MblobSelectFeature
| MIL_ID FeatureListId, | //in |
| MIL_INT64 Feature | //in |
This function selects the feature(s) to be calculated by MblobCalculate() when using the specified feature list.
Calculations for binary features are performed using the blob identifier image. Grayscale feature calculations are performed using both the blob identifier image and grayscale image. Features that have both binary and grayscale definitions are calculated using both the blob identifier image and the grayscale image (see MblobCalculate()).
You can get the feature results of a specific blob using MblobGetResultSingle(). To get the feature results of all blobs, use MblobGetResult(). The results of the features M_CHAIN_INDEX, M_CHAIN_X, M_CHAIN_Y, and M_CONVEX_HULL are only available with MblobGetResultSingle(). All other feature results are available with both MblobGetResultSingle() and MblobGetResult().
Note that you can change the number of Feret angles, for those features requiring them in calculations, using MblobControl().
Specifies the feature to add to the feature list. To add several features, you can call this function for each feature you want to add to the list. Alternatively, you can use one of the values listed in the For selecting groups of features in a single call table below. This table contains values that allow you to select commonly used groups of features in a single call.
The following group of features do not use grayscale pixel values; they are calculated using only the blob identifier image. Note that, unless otherwise stated, features can be calculated in either pixel or calibrated units.
 For specifying the feature to
add
For specifying the feature to
add |
|||||||||||||||||||||||||||||||||||||||
  Value Value |
Description
|
||||||||||||||||||||||||||||||||||||||
| M_ALL_FERETS + |
Determines all Feret diameters of every blob in the image. |
||||||||||||||||||||||||||||||||||||||
|
M_AREA + |
Determines the number of foreground pixels in a blob (holes are not counted). |
||||||||||||||||||||||||||||||||||||||
|
M_BLOB_TOUCHING_IMAGE_BORDERS + |
Determines whether blobs touched the border of the blob identifier image. |
||||||||||||||||||||||||||||||||||||||
|
M_BOX_AREA + |
Determines the area covered by the bounding box of a blob. |
||||||||||||||||||||||||||||||||||||||
| M_BOX_ASPECT_RATIO + |
Determines the ratio of the horizontal size to the vertical size of the bounding box of a blob. |
||||||||||||||||||||||||||||||||||||||
| M_BOX_FILL_RATIO + |
Determines the ratio of the area of a blob to the area of the bounding box of the blob. |
||||||||||||||||||||||||||||||||||||||
| M_BOX_X_MAX + |
Determines the extreme right coordinate of a blob. |
||||||||||||||||||||||||||||||||||||||
| M_BOX_X_MIN + |
Determines the extreme left coordinate of a blob. |
||||||||||||||||||||||||||||||||||||||
| M_BOX_Y_MAX + |
Determines the extreme bottom coordinate of a blob. |
||||||||||||||||||||||||||||||||||||||
| M_BOX_Y_MIN + |
Determines the extreme top coordinate of a blob. |
||||||||||||||||||||||||||||||||||||||
|
M_BREADTH + |
Determines a measure of the true breadth of an object, with the same advantages and disadvantages as M_LENGTH. 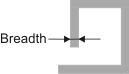
Determines a measure of the true breadth of an object, with the same advantages and disadvantages as M_LENGTH. |
||||||||||||||||||||||||||||||||||||||
| M_CHAIN_INDEX + |
Determines the indices which differentiate each chain's pixels within a specified blob. (more details...) |
||||||||||||||||||||||||||||||||||||||
|
M_CHAIN_X + |
Determines the X-coordinate of each chained pixel in the specified blob, for all chains contained within the blob (both the pixels bordering a blob and those delimiting its holes). (more details...) |
||||||||||||||||||||||||||||||||||||||
|
M_CHAIN_Y + |
Determines the Y-coordinate of each chained pixel in the specified blob, for all chains contained within the blob (both the pixels bordering a blob and those delimiting its holes). (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_COMPACTNESS + |
Determines the ratio between the area of a circle with the same perimeter as the blob in question, and the area of the blob itself. The minimum theoretical value of 1.0 is obtained if the blob is a perfect circle. In practice, the minimum obtainable value is slightly above 1. This is due to the effect of square pixel discretization. The more convoluted the shape, the greater the value. The formula used is equal to 
In the illusration above, the blobs have similar sizes but can be distinguised by their shapes. The compactness of the left blob is slightly above 1.0, while the compactness of the right blob is 1.24. (summarize)Determines the ratio between the area of a circle with the same perimeter as the blob in question, and the area of the blob itself. (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_CONVEX_HULL_AREA + |
Determines the area of the convex hull of a blob. |
||||||||||||||||||||||||||||||||||||||
| M_CONVEX_HULL_COG_X + |
Determines the X-component of the center of gravity of the convex hull. |
||||||||||||||||||||||||||||||||||||||
| M_CONVEX_HULL_COG_Y + |
Determines the Y-component of the center of gravity of the convex hull. |
||||||||||||||||||||||||||||||||||||||
| M_CONVEX_HULL_FILL_RATIO + |
Determines the ratio between the area of a blob and the area of the blob's convex hull. 
In the example above, the left blob has a convex hull fill ratio of 1.0 whereas the middle and rightmost blobs have a convex hull fill ratio of 0.9. (summarize)Determines the ratio between the area of a blob and the area of the blob's convex hull. (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_CONVEX_HULL_PERIMETER + |
Determines the perimeter of the convex hull of a blob. (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_CONVEX_HULL_X + |
Determines the X-coordinate of each point on the convex perimeter of a blob. (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_CONVEX_HULL_XY_PACKED + |
Determines the X- and Y-coordinate of each point on the convex perimeter of a blob. (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_CONVEX_HULL_Y + |
Determines the Y-coordinate of each point on the convex perimeter of a blob. (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_CONVEX_PERIMETER + |
Determines the approximation of the perimeter of the convex hull of a blob. (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_ELONGATION + |
Determines a value that is equal to M_LENGTH / M_BREADTH. It is similar to M_FERET_ELONGATION, except that it should be used for long thin objects. 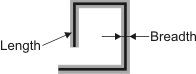
Determines a value that is equal to M_LENGTH / M_BREADTH. (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_EULER_NUMBER + |
Determines the number of blobs - number of holes. (more details...) |
||||||||||||||||||||||||||||||||||||||
|
M_FERET_AT_PRINCIPAL_AXIS_ANGLE + |
Determines the Feret diameter at the principal axis of a blob. (more details...) |
||||||||||||||||||||||||||||||||||||||
|
M_FERET_AT_SECONDARY_AXIS_ANGLE + |
Determines the Feret diameter at the secondary axis of a blob. (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_FERET_ELONGATION + |
Determines the measure of the shape of a blob. It is equal to M_FERET_MAX_DIAMETER / M_FERET_MIN_DIAMETER. It is accurate for reasonably compact objects, but becomes less accurate for very elongated objects (because M_FERET_MIN_DIAMETER becomes less accurate). For very elongated objects, M_ELONGATION should be used. 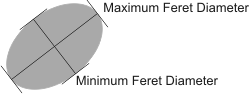
Determines the measure of the shape of a blob. (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_FERET_MAX_ANGLE + |
Determines the angle at which the maximum Feret diameter is found. (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_FERET_MAX_DIAMETER + |
Determines the largest Feret diameter found after checking a certain number of angles. More angles will give a more accurate result, but will take longer to calculate. However, the maximum Feret diameter is not very sensitive to the number of angles, and 8 usually gives an accurate result. 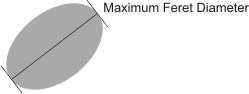
Determines the largest Feret diameter found after checking a certain number of angles. (more details...) |
||||||||||||||||||||||||||||||||||||||
|
M_FERET_MAX_DIAMETER_ELONGATION + |
Determines the ratio of the maximum Feret diameter by its perpendicular Feret diameter. 
Determines the ratio of the maximum Feret diameter by its perpendicular Feret diameter. |
||||||||||||||||||||||||||||||||||||||
| M_FERET_MEAN_DIAMETER + |
Determines the average Feret diameter at all the angles checked. |
||||||||||||||||||||||||||||||||||||||
| M_FERET_MIN_ANGLE + |
Determines the angle at which the minimum Feret diameter is found. (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_FERET_MIN_DIAMETER + |
Determines the smallest Feret diameter found after checking a certain number of angles. More angles will give a more accurate result, but will take longer to calculate. Note that this feature will not be very accurate for long thin blobs. However, you can get an accurate measure of the breadth of long thin blobs more quickly using M_BREADTH. 
Determines the smallest Feret diameter found after checking a certain number of angles. (more details...) |
||||||||||||||||||||||||||||||||||||||
|
M_FERET_MIN_DIAMETER_ELONGATION + |
Determines the ratio of the minimum Feret diameter by its perpendicular Feret diameter. 
Determines the ratio of the minimum Feret diameter by its perpendicular Feret diameter. |
||||||||||||||||||||||||||||||||||||||
|
M_FERET_PERPENDICULAR_TO_MAX_DIAMETER
+ |
Determines the Feret diameter that is perpendicular to the maximum Feret diameter. |
||||||||||||||||||||||||||||||||||||||
|
M_FERET_PERPENDICULAR_TO_MIN_DIAMETER
+ |
Determines the Feret diameter that is perpendicular to the minimum Feret diameter. |
||||||||||||||||||||||||||||||||||||||
|
M_FERET_PRINCIPAL_AXIS_ELONGATION
+ |
Determines the ratio of the Feret diameter at the principal axis to the Feret diameter at the secondary axis. It is equal to M_FERET_AT_PRINCIPAL_AXIS_ANGLE / M_FERET_AT_SECONDARY_AXIS_ANGLE. 
Determines the ratio of the Feret diameter at the principal axis to the Feret diameter at the secondary axis. (more details...) |
||||||||||||||||||||||||||||||||||||||
|
M_FERET_X + |
Determines the dimension of the minimum bounding box of a blob in the horizontal direction; that is, M_BOX_X_MAX - M_BOX_X_MIN + 1. 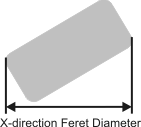
Determines the dimension of the minimum bounding box of a blob in the horizontal direction; that is, M_BOX_X_MAX - M_BOX_X_MIN + 1. |
||||||||||||||||||||||||||||||||||||||
|
M_FERET_Y + |
Determines the dimension of the minimum bounding box of a blob in the vertical direction; that is, M_BOX_Y_MAX - M_BOX_Y_MIN + 1. 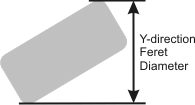
Determines the dimension of the minimum bounding box of a blob in the vertical direction; that is, M_BOX_Y_MAX - M_BOX_Y_MIN + 1. |
||||||||||||||||||||||||||||||||||||||
| M_FIRST_POINT_X + |
Determines (along with M_FIRST_POINT_Y) a unique point for each object, that is always on the perimeter of the object. (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_FIRST_POINT_Y + |
Determines (along with M_FIRST_POINT_X) a unique point for each object, that is always on the perimeter of the object. (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_GENERAL_FERET + |
Determines the general Feret diameter at an angle specified using MblobSelectFeret(). (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_INTERCEPT_0 + |
Determines the number of times a transition from background to foreground (not vice versa) occurs in the horizontal direction for the entire blob. (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_INTERCEPT_45 + |
Determines the number of times that the
neighborhood configuration |
||||||||||||||||||||||||||||||||||||||
| M_INTERCEPT_90 + |
Determines the number of times that the
neighborhood configuration |
||||||||||||||||||||||||||||||||||||||
| M_INTERCEPT_135 + |
Determines the number of times that the
neighborhood configuration |
||||||||||||||||||||||||||||||||||||||
| M_LABEL_VALUE + |
Determines the label value for each blob in an image. (more details...) |
||||||||||||||||||||||||||||||||||||||
|
M_LENGTH + |
Determines the measure of the true length of an object, although it can only be applied to certain object types because it is derived from the perimeter (P) and area (A) assuming that P = 2(length + breadth) and A = length x breadth. It complements M_FERET_MAX_DIAMETER because it is accurate for different blob types (for example, long thin ones). Note, it is calculated much faster than the maximum Feret diameter. 
Determines the measure of the true length of an object, although it can only be applied to certain object types because it is derived from the perimeter (P) and area (A) assuming that P = 2(length + breadth) and A = length x breadth. (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_MIN_AREA_BOX_ANGLE + |
Determines the angle of the minimum-area bounding box of a blob. The angle is always measured from the X-axis to the side from which the width is measured. 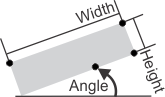
Determines the angle of the minimum-area bounding box of a blob. (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_MIN_AREA_BOX_AREA + |
Determines the area of the minimum-area bounding box of a blob. |
||||||||||||||||||||||||||||||||||||||
| M_MIN_AREA_BOX_CENTER_X |
Determines the X-coordinate of the center of the minimum-area bounding box of a blob. |
||||||||||||||||||||||||||||||||||||||
| M_MIN_AREA_BOX_CENTER_Y |
Determines the Y-coordinate of the center of the minimum-area bounding box of a blob. |
||||||||||||||||||||||||||||||||||||||
| M_MIN_AREA_BOX_HEIGHT + |
Determines the height of the minimum-area bounding box of a blob. (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_MIN_AREA_BOX_PERIMETER + |
Determines the perimeter of the minimum-area bounding box of a blob. |
||||||||||||||||||||||||||||||||||||||
| M_MIN_AREA_BOX_WIDTH + |
Determines the width of the minimum-area bounding box of a blob. (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_MIN_AREA_BOX_Xn |
Determines the X-coordinate of the n th vertex of the minimum-area bounding box of a blob, where n stands for an integer between 1 and 4. (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_MIN_AREA_BOX_Yn |
Determines the Y-coordinate of the n th vertex of the minimum-area bounding box of a blob, where n stands for an integer between 1 and 4. (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_MIN_PERIMETER_BOX_ANGLE + |
Determines the angle of the minimum-perimeter bounding box of a blob. The angle is always measured from the X-axis to the side from which the width is measured.
Determines the angle of the minimum-perimeter bounding box of a blob. (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_MIN_PERIMETER_BOX_AREA + |
Determines the area of the minimum-perimeter bounding box of a blob. |
||||||||||||||||||||||||||||||||||||||
|
M_MIN_PERIMETER_BOX_CENTER_X |
Determines the X-coordinate of the center of the minimum-perimeter bounding box of a blob. |
||||||||||||||||||||||||||||||||||||||
|
M_MIN_PERIMETER_BOX_CENTER_Y |
Determines the Y-coordinate of the center of the minimum-perimeter bounding box of a blob. |
||||||||||||||||||||||||||||||||||||||
| M_MIN_PERIMETER_BOX_HEIGHT + |
Determines the height of the minimum-perimeter bounding box of a blob. (more details...) |
||||||||||||||||||||||||||||||||||||||
|
M_MIN_PERIMETER_BOX_PERIMETER + |
Determines the perimeter of the minimum-perimeter bounding box of a blob. |
||||||||||||||||||||||||||||||||||||||
| M_MIN_PERIMETER_BOX_WIDTH + |
Determines the width of the minimum-perimeter bounding box of a blob. (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_MIN_PERIMETER_BOX_Xn |
Determines the X-coordinate of the n th vertex of the minimum-perimeter bounding box of a blob, where n stands for an integer between 1 and 4. (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_MIN_PERIMETER_BOX_Yn |
Determines the Y-coordinate of the n th vertex of the minimum-perimeter bounding box of a blob, where n stands for an integer between 1 and 4. (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_NUMBER_OF_CHAINED_PIXELS + |
Determines the number of chained pixels for all blobs or a specified blob. |
||||||||||||||||||||||||||||||||||||||
|
M_NUMBER_OF_CONVEX_HULL_POINTS + |
Determines the number of points on the convex perimeter of a blob. |
||||||||||||||||||||||||||||||||||||||
| M_NUMBER_OF_HOLES + |
Determines a value that is equal to the number of holes in a blob. (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_NUMBER_OF_RUNS + |
Determines a value that is equal to the total number of runs in a blob. (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_PERIMETER + |
Determines the total length of edges in a blob (including the edges of any holes), with an allowance made for the staircase effect that is produced when diagonal edges are digitized (inside corners are counted as 1.414, rather than 2.0). (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_RECTANGULARITY + |
Determines the degree to which a blob resembles a rectangle. To do this, MblobSelectFeature() calculates the ratio of the blob's area to the product of its minimum Feret diameter and the Feret diameter perpendicular to the minimum Feret diameter. 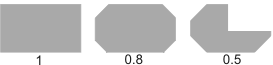
The three blobs above have the same minimum Feret diameter and the same Feret diameter perpendicular to the minimum Feret diameter. Only their shape and area differs. The rectangularity of the left blob is 1.0, indicating a perfect rectangle. The rectangularity of the middle blob is 0.8 and the rectangularity of the rightmost blob is 0.5. (summarize)Determines the degree to which a blob resembles a rectangle. (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_ROUGHNESS + |
Determines a measure of how rough a blob is and is equal to M_PERIMETER / M_CONVEX_PERIMETER. A smooth convex object will have the minimum roughness of 1.0. 
In the example above, the left blob has a roughness of 1.0, the middle blob has a roughness of 1.1, and the right blob has a roughess of 1.5. (summarize)Determines a measure of how rough a blob is and is equal to M_PERIMETER / M_CONVEX_PERIMETER. (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_WORLD_BOX_X_MAX |
Determines the extreme right X-coordinate of a blob, calculated in the relative coordinate system. |
||||||||||||||||||||||||||||||||||||||
| M_WORLD_BOX_X_MIN |
Determines the extreme left X-coordinate of a blob, calculated in the relative coordinate system. |
||||||||||||||||||||||||||||||||||||||
| M_WORLD_BOX_Y_MAX |
Determines the extreme bottom Y-coordinate of a blob, calculated in the relative coordinate system. |
||||||||||||||||||||||||||||||||||||||
| M_WORLD_BOX_Y_MIN |
Determines the extreme top Y-coordinate of a blob, calculated in the relative coordinate system. |
||||||||||||||||||||||||||||||||||||||
| M_WORLD_FERET_X |
Determines the dimension of the minimum bounding box of a blob in the horizontal direction, calculated in the relative coordinate system (that is, M_WORLD_BOX_X_MAX - M_WORLD_BOX_X_MIN + 1). |
||||||||||||||||||||||||||||||||||||||
| M_WORLD_FERET_Y |
Determines the dimension of the minimum bounding box of a blob in the vertical direction, calculated in the relative coordinate system (that is, M_WORLD_BOX_Y_MAX - M_WORLD_BOX_Y_MIN + 1). |
||||||||||||||||||||||||||||||||||||||
| M_WORLD_X_AT_Y_MAX |
Determines an X-coordinate that touches the maximum Y-coordinate of a blob, calculated in the relative coordinate system. (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_WORLD_X_AT_Y_MIN |
Determines an X-coordinate that touches the minimum Y-coordinate of a blob, calculated in the relative coordinate system. (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_WORLD_Y_AT_X_MAX |
Determines an Y-coordinate that touches the maximum X-coordinate of a blob, calculated in the relative coordinate system. (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_WORLD_Y_AT_X_MIN |
Determines an Y-coordinate that touches the minimum X-coordinate of a blob, calculated in the relative coordinate system. (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_X_MAX_AT_Y_MAX |
Determines the maximum X-coordinate at the maximum Y-coordinate of a blob, calculated in the pixel coordinate system. (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_X_MAX_AT_Y_MIN |
Determines the maximum X-coordinate at the minimum Y-coordinate of a blob, calculated in the pixel coordinate system. (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_X_MIN_AT_Y_MAX |
Determines the minimum X-coordinate at the maximum Y-coordinate of a blob, calculated in the pixel coordinate system. (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_X_MIN_AT_Y_MIN |
Determines the minimum X-coordinate at the minimum Y-coordinate of a blob, calculated in the pixel coordinate system. (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_Y_MAX_AT_X_MAX |
Determines the maximum Y-coordinate at the maximum X-coordinate of a blob, calculated in the pixel coordinate system. (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_Y_MAX_AT_X_MIN |
Determines the maximum Y-coordinate at the minimum X-coordinate of a blob, calculated in the pixel coordinate system. (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_Y_MIN_AT_X_MAX |
Determines the minimum Y-coordinate at the maximum X-coordinate of a blob, calculated in the pixel coordinate system. (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_Y_MIN_AT_X_MIN |
Determines the minimum Y-coordinate at the minimum X-coordinate of a blob, calculated in the pixel coordinate system. (more details...) |
||||||||||||||||||||||||||||||||||||||
 where A is the area of the blob and p is
the perimeter of the blob.
where A is the area of the blob and p is
the perimeter of the blob. occurs in a blob, where F is a foreground pixel,
B is a background pixel, and a dot can be any pixel
value.
occurs in a blob, where F is a foreground pixel,
B is a background pixel, and a dot can be any pixel
value. occurs in a blob.
occurs in a blob. occurs in a blob.
occurs in a blob.You can add one of the following values to the above-mentioned values to set a sorting key for result retrieval.
For features that have both grayscale and binary definitions, the grayscale version of the feature is used as the sorting key by default. To use the binary version, add M_BINARY to the feature selected as a sorting key. Only one feature can be selected as the first, second, or third sorting key.
|
For specifying a sorting key |
|||||||||||||||||||||||||||||||||||||||
| Combination value |
Description
|
||||||||||||||||||||||||||||||||||||||
|
M_NO_SORT |
Removes the specified sorting key. |
||||||||||||||||||||||||||||||||||||||
| M_SORTn_DOWN |
Specifies the feature as the n th sorting key (in descending order), where n stands for an integer between 1 and 3. |
||||||||||||||||||||||||||||||||||||||
|
M_SORTn_UP |
Specifies the feature as the n th sorting key (in ascending order), where n stands for an integer between 1 and 3. |
||||||||||||||||||||||||||||||||||||||
You can add one of the following values to the above-mentioned values to specify to calculate a contact point(s) of the Feret.
|
For specifying the use of Feret contact
points |
|||||||||||||||||||||||||||||||||||||||
| Combination value |
Description
|
||||||||||||||||||||||||||||||||||||||
| M_FERET_CONTACT_POINTS |
Determines the contact points of a Feret. |
||||||||||||||||||||||||||||||||||||||
| M_FERET_CONTACT_POINTS_X1 |
Determines the X-coordinate for the first contact point of the Feret diameter. |
||||||||||||||||||||||||||||||||||||||
| M_FERET_CONTACT_POINTS_X2 |
Determines the X-coordinate for the second contact point of the Feret diameter. |
||||||||||||||||||||||||||||||||||||||
| M_FERET_CONTACT_POINTS_Y1 |
Determines the Y-coordinate for the first contact point of the Feret diameter. |
||||||||||||||||||||||||||||||||||||||
| M_FERET_CONTACT_POINTS_Y2 |
Determines the Y-coordinate for the second contact point of the Feret diameter. |
||||||||||||||||||||||||||||||||||||||
The following features require grayscale pixel values, and can only be calculated if you provide a grayscale image.
|
For features with grayscale pixel
values |
|||||||||||||||||||||||||||||||||||||||
| Value |
Description
|
||||||||||||||||||||||||||||||||||||||
| M_BLOB_CONTRAST |
Determines the difference between the maximum and minimum pixel values of a blob. (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_MAX_PIXEL |
Determines the maximum pixel value found in a blob. |
||||||||||||||||||||||||||||||||||||||
| M_MEAN_PIXEL |
Determines the mean pixel value in a blob. (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_MIN_PIXEL |
Determines the minimum pixel value found in a blob. |
||||||||||||||||||||||||||||||||||||||
| M_SIGMA_PIXEL |
Determines the standard deviation of
pixel values in a blob. It is equal to Determines the standard deviation of pixel values in a blob. (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_SUM_PIXEL |
Determines the sum of all pixel values in a blob. |
||||||||||||||||||||||||||||||||||||||
| M_SUM_PIXEL_SQUARED |
Determines the sum of the squares of each pixel value in a blob. |
||||||||||||||||||||||||||||||||||||||
 , where N = number of pixels and p = pixel
value.
, where N = number of pixels and p = pixel
value.The following features have two different definitions: a binary definition, where all pixels are considered equal, and a grayscale, where pixels are weighted by their value in the gray image (the grayscale version is much slower to calculate). If you do not provide a grayscale image, only the binary version can be calculated. If you do provide a grayscale image, both versions are calculated.
|
For features with two
definitions |
|||||||||||||||||||||||||||||||||||||||
| Value |
Description
|
||||||||||||||||||||||||||||||||||||||
| M_AXIS_PRINCIPAL_ANGLE + |
Determines the angle at which a blob has the least moment of inertia. For elongated blobs, it is aligned with the longest axis. The result is always between -90° and +90°, measured in a counter-clockwise direction from the positive X-axis. It is calculated as: 
Determines the angle at which a blob has the least moment of inertia. (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_AXIS_SECONDARY_ANGLE + |
Determines the angle perpendicular to M_AXIS_PRINCIPAL_ANGLE. (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_CENTER_OF_GRAVITY_X + |
Determines the X-position of the center of gravity of a blob. (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_CENTER_OF_GRAVITY_Y + |
Determines the Y-position of the center of gravity of a blob. (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_MOMENT_CENTRAL_X0_Y2 + |
Determines the necessary calculation of the central moment where the order of X equals 0 and the order of Y equals 2. This central moment is defined as
For central moments, coordinates are relative to each blob's center of gravity, as opposed to ordinary moments, which use coordinates that are relative to the image origin (top-left corner). Calculate higher moments by calling MblobSelectMoment(). (summarize)Determines the necessary calculation of the central moment where the order of X equals 0 and the order of Y equals 2. (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_MOMENT_CENTRAL_X1_Y1 + |
Determines the necessary calculation of the central moment where the order of X equals 1 and the order of Y equals 1. This central moment is defined as
For central moments, coordinates are relative to each blob's center of gravity, as opposed to ordinary moments, which use coordinates that are relative to the image origin (top-left corner). Calculate higher moments by calling MblobSelectMoment(). (summarize)Determines the necessary calculation of the central moment where the order of X equals 1 and the order of Y equals 1. (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_MOMENT_CENTRAL_X2_Y0 + |
Determines the necessary calculation of the central moment where the order of X equals 2 and the order of Y equals 0. This central moment is defined as
For central moments, coordinates are relative to each blob's center of gravity, as opposed to ordinary moments, which use coordinates that are relative to the image origin (top-left corner). Calculate higher moments by calling MblobSelectMoment(). (summarize)Determines the necessary calculation of the central moment where the order of X equals 2 and the order of Y equals 0. (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_MOMENT_X0_Y1 + |
Determines the necessary calculation of the ordinary moment where the order of X equals 0 and the order of Y equals 1. This ordinary moment is defined as
In order to calculate the weighted arithmetic mean about Y, take the result returned by the calculation of this feature and divide it by the M_SUM_PIXEL feature (for grayscale values). For ordinary moments, coordinates are relative to the image origin (top-left corner), as opposed to central moments, which use coordinates that are relative to each blob's center of gravity. Calculate higher moments by calling MblobSelectMoment(). (summarize)Determines the necessary calculation of the ordinary moment where the order of X equals 0 and the order of Y equals 1. (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_MOMENT_X0_Y2 + |
Determines the necessary calculation of the ordinary moment where the order of X equals 0 and the order of Y equals 2. This ordinary moment is defined as
For ordinary moments, coordinates are relative to the image origin (top-left corner), as opposed to central moments, which use coordinates that are relative to each blob's center of gravity. Calculate higher moments by calling MblobSelectMoment(). (summarize)Determines the necessary calculation of the ordinary moment where the order of X equals 0 and the order of Y equals 2. (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_MOMENT_X1_Y0 + |
Determines the necessary calculation of the ordinary moment where the order of X equals 1 and the order of Y equals 0. This ordinary moment is defined as
In order to calculate the weighted arithmetic mean about X, take the result returned by the calculation of this feature and divide it by the M_SUM_PIXEL feature (for grayscale values). For ordinary moments, coordinates are relative to the image origin (top-left corner), as opposed to central moments, which use coordinates that are relative to each blob's center of gravity. Calculate higher moments by calling MblobSelectMoment(). (summarize)Determines the necessary calculation of the ordinary moment where the order of X equals 1 and the order of Y equals 0. (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_MOMENT_X1_Y1 + |
Determines the necessary calculation of the ordinary moment where the order of X equals 1 and the order of Y equals 1. This ordinary moment is defined as
For ordinary moments, coordinates are relative to the image origin (top-left corner), as opposed to central moments, which use coordinates that are relative to each blob's center of gravity. Calculate higher moments by calling MblobSelectMoment(). (summarize)Determines the necessary calculation of the ordinary moment where the order of X equals 1 and the order of Y equals 1. (more details...) |
||||||||||||||||||||||||||||||||||||||
| M_MOMENT_X2_Y0 + |
Determines the necessary calculation of the ordinary moment where the order of X equals 2 and the order of Y equals 0. This ordinary moment is defined as
For ordinary moments, coordinates are relative to the image origin (top-left corner), as opposed to central moments, which use coordinates that are relative to each blob's center of gravity. Calculate higher moments by calling MblobSelectMoment(). (summarize)Determines the necessary calculation of the ordinary moment where the order of X equals 2 and the order of Y equals 0. (more details...) |
||||||||||||||||||||||||||||||||||||||
 , where i and n are the lower and
upper bounds of the summation respectively,
, where i and n are the lower and
upper bounds of the summation respectively,  = the first order ordinary moment about
Y divided by the sum of the pixel values (
= the first order ordinary moment about
Y divided by the sum of the pixel values ( , where i and n are the lower and
upper bounds of the summation respectively,
, where i and n are the lower and
upper bounds of the summation respectively,  = the
first ordinary order moment about Xi divided by
the sum of the pixel values (
= the
first ordinary order moment about Xi divided by
the sum of the pixel values ( , where i and n are the lower and
upper bounds of the summation respectively,
, where i and n are the lower and
upper bounds of the summation respectively,  , where i and n are the lower and upper
bounds of the summation respectively,
, where i and n are the lower and upper
bounds of the summation respectively,  , where i and n are the lower and upper
bounds of the summation respectively,
, where i and n are the lower and upper
bounds of the summation respectively,  , where i and n are the lower and upper
bounds of the summation respectively,
, where i and n are the lower and upper
bounds of the summation respectively,  , where i and n are the lower and upper
bounds of the summation respectively,
, where i and n are the lower and upper
bounds of the summation respectively,  , where i and n are the lower and upper
bounds of the summation respectively,
, where i and n are the lower and upper
bounds of the summation respectively, The following values allow you to select groups of features in a single call.
You can add one of the following values to the above-mentioned values to set whether to use the binary or grayscale version of the selected feature.
|
For specifying whether to use the binary
or grayscale version of the selected feature |
|||||||||||||||||||||||||||||||||||||||
| Combination value |
Description
|
||||||||||||||||||||||||||||||||||||||
|
M_BINARY |
Calculates the selected feature in the binary version only. |
||||||||||||||||||||||||||||||||||||||
| M_GRAYSCALE |
Calculates the selected feature in the grayscale version only. |
||||||||||||||||||||||||||||||||||||||
| Header | Include mil.h. |
| Library | Use mil.lib; milblob.lib. |
| DLL | Requires mil.dll; milblob.dll. |