M3dmapTriangulate
- See also

 Availability
Availability
 Function map
Function map
- Examples
 M3dmapStream
M3dmapStream
- Next

- array of type MIL_ID [optionally, in C++: a reference to a
constant std::vector<MIL_ID> ]
(and a maximum array rank for C# of 1)
Required array size:(NumCalibrations) - array of type MIL_DOUBLE [optionally, in C++: a reference to a
constant std::vector<MIL_DOUBLE>
] (and a maximum array rank for C# of 1)
Required array size:((NumCalibrations) * (NumPoints)) - array of type MIL_DOUBLE [optionally, in C++: a reference to a
constant std::vector<MIL_DOUBLE>
] (and a maximum array rank for C# of 1)
Required array size:((NumCalibrations) * (NumPoints)) - array of type MIL_DOUBLE [optionally, in C++: a reference to a
std::vector<MIL_DOUBLE>
] (and a maximum array rank for C# of 1)
Required array size:(NumPoints) - array of type MIL_DOUBLE [optionally, in C++: a reference to a
std::vector<MIL_DOUBLE>
] (and a maximum array rank for C# of 1)
Required array size:(NumPoints) - array of type MIL_DOUBLE [optionally, in C++: a reference to a
std::vector<MIL_DOUBLE>
] (and a maximum array rank for C# of 1)
Required array size:(NumPoints) - array of type MIL_DOUBLE [optionally, in C++: a reference to a
std::vector<MIL_DOUBLE>
] (and a maximum array rank for C# of 1)
Required array size:(NumPoints)
in the MIL Reference for the minimum update required.
| const MIL_ID *ContextCalOrImageBufIdArrayPtr, | //in |
| const MIL_DOUBLE *PixelCoordXArrayPtr, | //in |
| const MIL_DOUBLE *PixelCoordYArrayPtr, | //in |
| MIL_DOUBLE *WorldCoordXArrayPtr, | //out |
| MIL_DOUBLE *WorldCoordYArrayPtr, | //out |
| MIL_DOUBLE *WorldCoordZArrayPtr, | //out |
| MIL_DOUBLE *RMSErrorArrayPtr, | //out |
| MIL_INT NumCalibrations, | //in |
| MIL_INT NumPoints, | //in |
| MIL_INT64 CoordinateSystem, | //in |
| MIL_INT64 ControlFlag | //in |
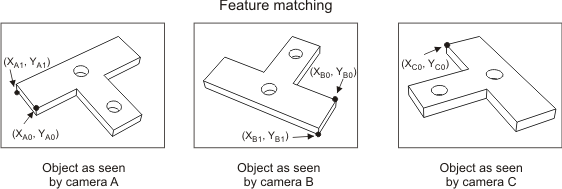
This function performs stereo vision triangulation (stereophotogrammetry) to calculate the X-, Y-, and Z-world coordinates of points (features) that can be seen by two or more cameras. You must identify the pixel location of the points in the image plane of the different cameras. Each of the camera setups must be calibrated in 3D mode so that the position of the cameras in the world is known. To calculate each point's location in the world, the point's location in each camera's image plane and the camera's location in the world are used.
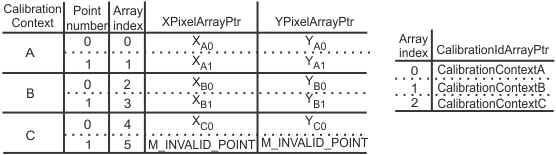
With a single call to M3dmapTriangulate(), you can calculate the world coordinates of multiple points, even if a point does not appear in the image plane of all cameras. Each point must be seen by at least two cameras. To indicate that a point is not seen by a camera, use M_INVALID_POINT. For example, to determine the world coordinates of the following two points on an object that is seen by three cameras, you would pass the following arguments to M3dmapTriangulate():
The camera calibration contexts of the camera setups must have been allocated in 3D mode using McalAlloc() with M_TSAI_BASED or M_3D_ROBOTICS and they must share a common world coordinate system. For more information about camera calibration, see Chapter 26: Calibrating your camera setup.
Although results can be obtained with only two cameras, rounding and extraction errors can affect the accuracy of the calculations. Using more than two cameras will increase the robustness of the function.
For points that could not be computed, their corresponding entries in the coordinate output arrays will be set to M_INVALID_POINT and their corresponding entries in the RMSErrorArrayPtr array will be set to 0.0. This can occur when all projection lines from the image planes to the point are perfectly parallel and therefore do not intersect.
Specifies the address of an array containing the identifiers of the camera calibration contexts for each of the camera setups. Alternatively, the array can contain the identifiers of calibrated or corrected images; the operation uses the camera calibration contexts associated with the images.
Specifies the address of the array containing the X-pixel coordinates of the common points in the image plane of each camera. This array must have a size equal to (NumCalibrations x NumPoints).
Specify the location of the points in the image plane of a given camera, before specifying them for another camera; list them in the same order for each camera. If more than two cameras are used and a point is seen by only a subset of all the cameras, indicate that the point is not seen by a camera by setting the corresponding entry in the array to M_INVALID_POINT. Order the groups of points according to order of their camera's calibration context in the specified list of camera calibration contexts (ContextCalOrImageBufIdArrayPtr).
Specifies the address of the array containing the Y-pixel coordinates of the common points in the image plane of each camera. This array must have a size equal to (NumCalibrations x NumPoints).
Specify the location of the points in the image plane of a given camera, before specifying them for another camera; list them in the same order for each camera. If more than two cameras are used and a point is seen by only a subset of all the cameras, indicate that the point is not seen by a camera by setting the corresponding entry in the array to M_INVALID_POINT. Order the groups of points according to order of their camera's calibration context in the specified list of camera calibration contexts (ContextCalOrImageBufIdArrayPtr).
Specifies the address of an array in which to write the calculated X-world coordinates. This array must have a size equal to NumPoints.
Specifies the address of the array in which to write the calculated Y-world coordinates. This array must have a size equal to NumPoints.
Specifies the address of the array in which to write the calculated Z-world coordinates. This array must have a size equal to NumPoints.
Specifies the address of the array in which to write the root mean square (RMS) error for the calculated world coordinates of each point. This array must have a size equal to NumPoints.
If the RMS error is not needed, set this parameter to M_NULL.
Specifies the number of camera calibration contexts. This should correspond to the number of cameras. This parameter must be greater or equal to 2.
When using a standard vector (std::vector) overload function in C++, you can pass M_DEFAULT to this parameter and MIL will automatically determine the size based on the number of items in the vector passed to the ContextCalOrImageBufIdArrayPtr parameter.
Specifies the number of points to compute using stereo vision triangulation. This parameter must be greater or equal to 1.
When using a standard vector (std::vector) overload function in C++, you can pass M_DEFAULT to this parameter and MIL will automatically determine the size based on the number of items in the vector passed to the PixelCoordXArrayPtr or PixelCoordYArrayPtr parameter.
Specifies the world coordinate system that is common to all the specified camera calibration contexts.
|
For specifying the common coordinate
system |
|||||||||||||||||||||||||||||||||||||||
| Description | |||||||||||||||||||||||||||||||||||||||
|
Specifies that the camera calibration contexts have the absolute coordinate system in common. |
|||||||||||||||||||||||||||||||||||||||
|
Specifies that the camera calibration contexts have the relative coordinate system in common. |
|||||||||||||||||||||||||||||||||||||||
|
Specifies that the camera calibration contexts have the robot-base coordinate system in common. |
|||||||||||||||||||||||||||||||||||||||
|
Specifies that the camera calibration contexts have the tool coordinate system in common. |
|||||||||||||||||||||||||||||||||||||||
| Header | Include mil.h. |
| Library | Use mil.lib; mil3dmap.lib. |
| DLL | Requires mil.dll; mil3dmap.dll. |