After fixturing
Fixturing is useful if, after moving the relative coordinate system, you perform and/or retrieve results from analysis operations in world units. It is also useful if you perform processing/analysis operations restricted to an image buffer's region of interest defined in world units. Essentially, you need to work in world units for the units to be with respect to the relative coordinate system. For a list of the modules that support input settings and returned results in world units, and those that support regions of interest defined in world units, see the Working with real-world units section of Chapter 25: Calibrating your camera setup.
If you can't work in world units because the MIL module does not support it or you are using a third-party tool, it might still be useful to fixture the relative coordinate system to an object. In this case, you could use the relative coordinate system to transform the image so that the object has the same coordinates in the pixel coordinate system as it has in a training image.
Note that if you don't need to work in real world units, you can associate the default uniform calibration context with your image; this sets the absolute world coordinate system to have the same origin and orientation as the pixel coordinate system, and sets world units equal to 1 pixel.
Inputting values in real-world units
The modules that support settings in world units require that you set the working unit to M_WORLD and you use a calibrated image, before they interpret their settings as being in world units. Otherwise, by default, they interpret their settings as being in pixel units, even if a module natively works in world units. The function and constant to set the working unit depends on the module; for a list of these, see the Input settings in world units subsection of the Working with real-world units section of Chapter 25: Calibrating your camera setup.
Results in world units
When you use a calibrated image, the modules that support returning results in world units typically do so by default. In this case, to have results returned in pixel units, you must set the output units to pixels; to do so, call the module's control function with M_RESULT_OUTPUT_UNITS set to M_PIXEL. For more information, see the Getting results in world units subsection of the Working with real-world units section of Chapter 25: Calibrating your camera setup.
Restricting processing/analysis to a region of interest defined in world units
If supported by the function, you can restrict processing and analysis to an image buffer's region of interest; define the region of interest for the image buffer using MbufSetRegion(). If the region of interest is defined in world units, it will move according to the relative coordinate system of the image. So, if you fixture the relative coordinate system to an object, the region of interest will move accordingly, allowing you to restrict processing/analysis to the required object characteristics.
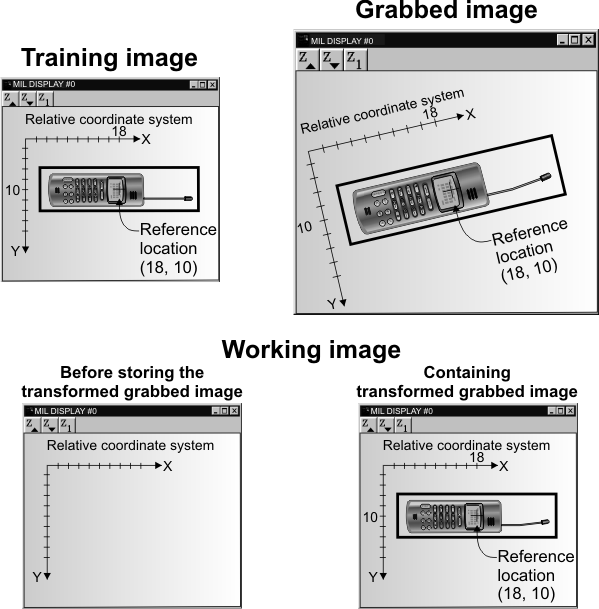
Transforming your images after fixturing
Even if you can't continue working in world units, fixturing can simplify your application when analyzing/processing objects that don't have a fixed location. In these cases, you can transform grabbed images so that the target object is at the same location as in a training image. This allows you to keep the same analysis setting for all instances of an object without taking into account the new location of the object. This also allows you to make comparisons between expected results and obtained results without conversion.
To transform grabbed images so that the target object is at the same location as in a training image and then perform required analysis/processing on the object, do the following:
-
Allocate an image buffer to store the transformed version of the grabbed image; it will be used as the working image buffer. Allocate it to have the same size as the training image.
-
Copy the calibration information of the training image to the working image, using McalAssociate().
-
For each instance of the object in each grabbed image:
-
Fixture the relative coordinate system to the target object in the grabbed image.
-
Create a transformed version of the grabbed image and save it in the working image buffer, using McalTransformImage() with M_USE_DESTINATION_CALIBRATION. This transforms the grabbed image so that its relative coordinate system is placed at the same location as the current relative coordinate system of the working image buffer.
-
Perform the required processing/analysis operations on the working image buffer.
-
For example, to transform a grabbed image so that an object has the same size and position as in a training image:
/* Set up phase. */
/* If the image is not yet corrected, do it now. */
McalTransformImage(GoldenTemplateImageId, GoldenTemplateImageId, M_NULL,
M_DEFAULT, M_DEFAULT, M_DEFAULT);
/* Define a model in the golden template image. */
MmodDefine(ModContextId, M_IMAGE, GoldenTemplateImageId,
ModelOffsetX, ModelOffsetY, ModelWidth, ModelHeight);
/* Learn the fixturing offset from the model. */
McalFixture(M_NULL, FixturingOffsetId, M_LEARN_OFFSET, M_MODEL_MOD,
ModContextId, 0,
M_DEFAULT, M_DEFAULT, M_DEFAULT);
/* ... */
/* Critical loop. */
while (!Stop)
{
/* Acquire image. */
/* ... */
/* Find the model in GrabbedImageId */
MmodFind(ModContextId, GrabbedImageId, ModResultId);
/* Make sure the model is found. */
/* ... */
/* Move the relative coordinate system (with learned offset)
according to the found location of the model. */
McalFixture(GrabbedImageId, FixturingOffsetId, M_MOVE_RELATIVE, M_RESULT_MOD,
ModResultId, 0,
M_DEFAULT, M_DEFAULT, M_DEFAULT);
/* Transform the grabbed image such that its relative coordinate system
is at the same position and angle as the golden template image. */
McalAssociate(GoldenTemplateImageId, TransformedGrabbedImageId, M_DEFAULT);
McalTransformImage(GrabbedImageId, TransformedGrabbedImageId, M_NULL,
M_DEFAULT, M_DEFAULT,
M_USE_DESTINATION_CALIBRATION);
/* Process transformed image
(probably comparing it with GoldenTemplateImageId).
... */
}