M3dgeoMatrixGetTransform
- See also

 Availability
Availability
 Function map
Function map
- Examples
 M3dgeoMatrixGet
M3dgeoMatrixGet
- M3dgeoMatrixPut

| MIL_ID Matrix3dgeoId, | //in |
| MIL_INT64 InquireType, | //in |
| MIL_DOUBLE *Param1Ptr, | //out |
| MIL_DOUBLE *Param2Ptr, | //out |
| MIL_DOUBLE *Param3Ptr, | //out |
| MIL_DOUBLE *Param4Ptr, | //out |
| MIL_INT64 ControlFlag | //in |
This function retrieves the translation, rotation, or scale defined by a given transformation matrix object.
Note that M3dgeoMatrixGetTransform() returns angles in degrees. However, unlike most other MIL functions, this function returns angles following the right-hand grip rule around the axis of rotation; if you wrap your right hand around the axis of rotation, pointing your thumb in the positive direction of the axis, your fingers wrap in the direction of rotation. For example, a positive rotation around the Z-axis corresponds to a rotation that turns the positive X-axis toward the positive Y-axis.
All coordinates are expressed in world units in the working coordinate system.
Specifies the identifier of the transformation matrix object. The transformation matrix object must have been previously allocated using M3dgeoAlloc() with M_TRANSFORMATION_MATRIX.
This function only supports matrices that can qualify as matrices of any type other than M_AFFINE or M_PROJECTION. A transformation matrix object is supported if passing it in a call to M3dgeoInquire() with the M_TRANSFORMATION_TYPE inquire type returns any value other than M_AFFINE or M_PROJECTION.
|
For specifying the transformation matrix object
identifier |
|||||||||||||||||||||||||||||||||||||||
| Description | |||||||||||||||||||||||||||||||||||||||
|
Specifies the identifier of a 3D geometry object. |
|||||||||||||||||||||||||||||||||||||||
Specifies the type of transformation to retrieve from the given transformation matrix object.
See the Parameter associations section for possible values that can be specified.
Specifies the first address in which to return information about the transformation required.
See the Parameter associations section for possible values that can be returned.
Specifies the second address in which to return information about the transformation required.
See the Parameter associations section for possible values that can be returned.
Specifies the third address in which to return information about the transformation required.
See the Parameter associations section for possible values that can be returned.
Specifies the fourth address in which to return information about the transformation required.
If this parameter is not used, it must be set to M_NULL.
See the Parameter associations section for possible values that can be returned.
The table below lists possible values for the InquireType parameter and possible values returned to the Param1Ptr, Param2Ptr, Param3Ptr, and Param4Ptr parameters.
Any parameters for which a value is not returned must be set to M_NULL.
|
For specifying the transformation type
|
|||||||||||||||||||||||||||||||||||||||
| Description | |||||||||||||||||||||||||||||||||||||||
|
Param1Ptr - Possible values returned |
|||||||||||||||||||||||||||||||||||||||
|
Param2Ptr - Possible values returned |
|||||||||||||||||||||||||||||||||||||||
|
Param3Ptr - Possible values returned |
|||||||||||||||||||||||||||||||||||||||
|
Param4Ptr - Possible values returned |
|||||||||||||||||||||||||||||||||||||||
|
Retrieves the axis and angle of rotation. The axis of rotation is defined by a vector. The rotation angle is measured in the counter-clockwise direction around the axis of rotation, as per the right-hand rule. 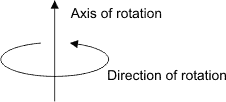
The axis of rotation is always normalized. SET (summarize)Retrieves the axis and angle of rotation. SET (more details...) |
|||||||||||||||||||||||||||||||||||||||
|
Returns the X-component of the vector that defines the axis of rotation. |
|||||||||||||||||||||||||||||||||||||||
|
Returns the Y-component of the vector that defines the axis of rotation. |
|||||||||||||||||||||||||||||||||||||||
|
Returns the Z-component of the vector that defines the axis of rotation. |
|||||||||||||||||||||||||||||||||||||||
|
Returns the angle of the rotation, in degrees, around the axis of rotation. (summarize)Returns the angle of the rotation, in degrees, around the axis of rotation. (more details...) |
|||||||||||||||||||||||||||||||||||||||
 0 <=
Value < 360 0 <=
Value < 360 |
Specifies the rotation angle, in degrees. |
||||||||||||||||||||||||||||||||||||||
|
Retrieves the normalized vector of the X-axis which results from applying the given transformation matrix to the working coordinate system's X-axis. SET (summarize)Retrieves the normalized vector of the X-axis which results from applying the given transformation matrix to the working coordinate system's X-axis. SET (more details...) |
|||||||||||||||||||||||||||||||||||||||
|
Returns the X-component of the vector. |
|||||||||||||||||||||||||||||||||||||||
|
Returns the Y-component of the vector. |
|||||||||||||||||||||||||||||||||||||||
|
Returns the Z-component of the vector. |
|||||||||||||||||||||||||||||||||||||||
|
Retrieves the normalized vector of the Y-axis which results from applying the given transformation matrix to the working coordinate system's Y-axis. SET (summarize)Retrieves the normalized vector of the Y-axis which results from applying the given transformation matrix to the working coordinate system's Y-axis. SET (more details...) |
|||||||||||||||||||||||||||||||||||||||
|
Returns the X-component of the vector. |
|||||||||||||||||||||||||||||||||||||||
|
Returns the Y-component of the vector. |
|||||||||||||||||||||||||||||||||||||||
|
Returns the Z-component of the vector. |
|||||||||||||||||||||||||||||||||||||||
|
Retrieves the normalized vector of the Z-axis which results from applying the given transformation matrix to the working coordinate system's Z-axis. SET (summarize)Retrieves the normalized vector of the Z-axis which results from applying the given transformation matrix to the working coordinate system's Z-axis. SET (more details...) |
|||||||||||||||||||||||||||||||||||||||
|
Returns the X-component of the vector. |
|||||||||||||||||||||||||||||||||||||||
|
Returns the Y-component of the vector. |
|||||||||||||||||||||||||||||||||||||||
|
Returns the Z-component of the vector. |
|||||||||||||||||||||||||||||||||||||||
|
Retrieves the components of the rotation quaternion. The quaternion is always normalized. SET (summarize)Retrieves the components of the rotation quaternion. SET (more details...) |
|||||||||||||||||||||||||||||||||||||||
|
Returns the scalar component of the quaternion. |
|||||||||||||||||||||||||||||||||||||||
|
Returns the X-component of the quaternion. |
|||||||||||||||||||||||||||||||||||||||
|
Returns the Y-component of the quaternion. |
|||||||||||||||||||||||||||||||||||||||
|
Returns the Z-component of the quaternion. |
|||||||||||||||||||||||||||||||||||||||
|
Retrieves the three distinct rotations about the axes of the working coordinate system in the following order: the X-axis, the Y-axis, and the Z-axis rotation. SET (summarize)Retrieves the three distinct rotations about the axes of the working coordinate system in the following order: the X-axis, the Y-axis, and the Z-axis rotation. SET (more details...) |
|||||||||||||||||||||||||||||||||||||||
|
Returns the X-axis rotation. (summarize)Returns the X-axis rotation. (more details...) |
|||||||||||||||||||||||||||||||||||||||
| 0.0 <= Value <
360.0 |
Specifies the X-axis rotation, in degrees. |
||||||||||||||||||||||||||||||||||||||
|
Returns the Y-axis rotation. (summarize)Returns the Y-axis rotation. (more details...) |
|||||||||||||||||||||||||||||||||||||||
| 0.0 <= Value <=
90.0 |
Specifies the Y-axis rotation, in degrees, when located between the positive Z-axis and the positive X-axis. |
||||||||||||||||||||||||||||||||||||||
| 270.0 <= Value <
360.0 |
Specifies the Y-axis rotation, in degrees, when located between the positive Z-axis and the negative X-axis. |
||||||||||||||||||||||||||||||||||||||
|
Returns the Z-axis rotation. (summarize)Returns the Z-axis rotation. (more details...) |
|||||||||||||||||||||||||||||||||||||||
| 0.0 <= Value <
360.0 |
Specifies the Z-axis rotation, in degrees. |
||||||||||||||||||||||||||||||||||||||
|
Retrieves the three distinct rotations about the axes of the working coordinate system in the following order: the X-axis, the Z-axis, and the Y-axis rotation. SET (summarize)Retrieves the three distinct rotations about the axes of the working coordinate system in the following order: the X-axis, the Z-axis, and the Y-axis rotation. SET (more details...) |
|||||||||||||||||||||||||||||||||||||||
|
Returns the X-axis rotation. (summarize)Returns the X-axis rotation. (more details...) |
|||||||||||||||||||||||||||||||||||||||
| 0.0 <= Value <
360.0 |
Specifies the X-axis rotation, in degrees. |
||||||||||||||||||||||||||||||||||||||
|
Returns the Z-axis rotation. (summarize)Returns the Z-axis rotation. (more details...) |
|||||||||||||||||||||||||||||||||||||||
| 0.0 <= Value <=
90.0 |
Specifies the Z-axis rotation, in degrees, when located between the positive X-axis and the positive Y-axis. |
||||||||||||||||||||||||||||||||||||||
| 270.0 <= Value <
360.0 |
Specifies the Z-axis rotation, in degrees, when located between the positive X-axis and the negative Y-axis. |
||||||||||||||||||||||||||||||||||||||
|
Returns the Y-axis rotation. (summarize)Returns the Y-axis rotation. (more details...) |
|||||||||||||||||||||||||||||||||||||||
| 0.0 <= Value <
360.0 |
Specifies the Y-axis rotation, in degrees. |
||||||||||||||||||||||||||||||||||||||
|
Retrieves the three distinct rotations about the axes of the working coordinate system in the following order: the Y-axis, the X-axis, and the Z-axis rotation. SET (summarize)Retrieves the three distinct rotations about the axes of the working coordinate system in the following order: the Y-axis, the X-axis, and the Z-axis rotation. SET (more details...) |
|||||||||||||||||||||||||||||||||||||||
|
Returns the Y-axis rotation. (summarize)Returns the Y-axis rotation. (more details...) |
|||||||||||||||||||||||||||||||||||||||
| 0.0 <= Value <
360.0 |
Specifies the Y-axis rotation, in degrees. |
||||||||||||||||||||||||||||||||||||||
|
Returns the X-axis rotation. (summarize)Returns the X-axis rotation. (more details...) |
|||||||||||||||||||||||||||||||||||||||
| 0.0 <= Value <=
90.0 |
Specifies the X-axis rotation, in degrees, when located between the positive Y-axis and the positive Z-axis. |
||||||||||||||||||||||||||||||||||||||
| 270.0 <= Value <
360.0 |
Specifies the X-axis rotation, in degrees, when located between the positive Y-axis and the negative Z-axis. |
||||||||||||||||||||||||||||||||||||||
|
Returns the Z-axis rotation. (summarize)Returns the Z-axis rotation. (more details...) |
|||||||||||||||||||||||||||||||||||||||
| 0.0 <= Value <
360.0 |
Specifies the Z-axis rotation, in degrees. |
||||||||||||||||||||||||||||||||||||||
|
Retrieves the three distinct rotations about the axes of the working coordinate system in the following order: the Y-axis, the Z-axis, and the X-axis rotation. SET (summarize)Retrieves the three distinct rotations about the axes of the working coordinate system in the following order: the Y-axis, the Z-axis, and the X-axis rotation. SET (more details...) |
|||||||||||||||||||||||||||||||||||||||
|
Returns the Y-axis rotation. (summarize)Returns the Y-axis rotation. (more details...) |
|||||||||||||||||||||||||||||||||||||||
| 0.0 <= Value <
360.0 |
Specifies the Y-axis rotation, in degrees. |
||||||||||||||||||||||||||||||||||||||
|
Returns the Z-axis rotation. (summarize)Returns the Z-axis rotation. (more details...) |
|||||||||||||||||||||||||||||||||||||||
| 0.0 <= Value <=
90.0 |
Specifies the Z-axis rotation, in degrees, when located between the positive X-axis and the positive Y-axis. |
||||||||||||||||||||||||||||||||||||||
| 270.0 <= Value <
360.0 |
Specifies the Z-axis rotation, in degrees, when located between the positive X-axis and the negative Y-axis. |
||||||||||||||||||||||||||||||||||||||
|
Returns the X-axis rotation. (summarize)Returns the X-axis rotation. (more details...) |
|||||||||||||||||||||||||||||||||||||||
| 0.0 <= Value <
360.0 |
Specifies the X-axis rotation, in degrees. |
||||||||||||||||||||||||||||||||||||||
|
Retrieves the three distinct rotations about the axes of the working coordinate system in the following order: the Z-axis, the X-axis, and the Y-axis rotation. SET (summarize)Retrieves the three distinct rotations about the axes of the working coordinate system in the following order: the Z-axis, the X-axis, and the Y-axis rotation. SET (more details...) |
|||||||||||||||||||||||||||||||||||||||
|
Returns the Z-axis rotation. (summarize)Returns the Z-axis rotation. (more details...) |
|||||||||||||||||||||||||||||||||||||||
| 0.0 <= Value <
360.0 |
Specifies the Z-axis rotation, in degrees. |
||||||||||||||||||||||||||||||||||||||
|
Returns the X-axis rotation. (summarize)Returns the X-axis rotation. (more details...) |
|||||||||||||||||||||||||||||||||||||||
| 0.0 <= Value <=
90.0 |
Specifies the X-axis rotation, in degrees, when located between the positive Y-axis and the positive Z-axis. |
||||||||||||||||||||||||||||||||||||||
| 270.0 <= Value <
360.0 |
Specifies the X-axis rotation, in degrees, when located between the positive Y-axis and the negative Z-axis. |
||||||||||||||||||||||||||||||||||||||
|
Returns the Y-axis rotation. (summarize)Returns the Y-axis rotation. (more details...) |
|||||||||||||||||||||||||||||||||||||||
| 0.0 <= Value <
360.0 |
Specifies the Y-axis rotation, in degrees. |
||||||||||||||||||||||||||||||||||||||
|
Retrieves the three distinct rotations about the axes of the working coordinate system in the following order: the Z-axis, the Y-axis, and the X-axis rotation. SET (summarize)Retrieves the three distinct rotations about the axes of the working coordinate system in the following order: the Z-axis, the Y-axis, and the X-axis rotation. SET (more details...) |
|||||||||||||||||||||||||||||||||||||||
|
Returns the Z-axis rotation. (summarize)Returns the Z-axis rotation. (more details...) |
|||||||||||||||||||||||||||||||||||||||
| 0.0 <= Value <
360.0 |
Specifies the Z-axis rotation, in degrees. |
||||||||||||||||||||||||||||||||||||||
|
Returns the Y-axis rotation. (summarize)Returns the Y-axis rotation. (more details...) |
|||||||||||||||||||||||||||||||||||||||
| 0.0 <= Value <=
90.0 |
Specifies the Y-axis rotation, in degrees, when located between the positive Z-axis and the positive X-axis. |
||||||||||||||||||||||||||||||||||||||
| 270.0 <= Value <
360.0 |
Specifies the Y-axis rotation, in degrees, when located between the positive Z-axis and the negative X-axis. |
||||||||||||||||||||||||||||||||||||||
|
Returns the X-axis rotation. (summarize)Returns the X-axis rotation. (more details...) |
|||||||||||||||||||||||||||||||||||||||
| 0.0 <= Value <
360.0 |
Specifies the X-axis rotation, in degrees. |
||||||||||||||||||||||||||||||||||||||
|
Retrieves the scale factor along each axis. SET (summarize)Retrieves the scale factor along each axis. SET (more details...) |
|||||||||||||||||||||||||||||||||||||||
|
Returns the scaling factor in X. |
|||||||||||||||||||||||||||||||||||||||
|
Returns the scaling factor in Y. |
|||||||||||||||||||||||||||||||||||||||
|
Returns the scaling factor in Z. |
|||||||||||||||||||||||||||||||||||||||
|
Retrieves the translation along each of the axes of the working coordinate system. SET (summarize)Retrieves the translation along each of the axes of the working coordinate system. SET (more details...) |
|||||||||||||||||||||||||||||||||||||||
|
Returns the displacement along the X-axis of the working coordinate system. |
|||||||||||||||||||||||||||||||||||||||
|
Returns the displacement along the Y-axis of the working coordinate system. |
|||||||||||||||||||||||||||||||||||||||
|
Returns the displacement along the Z-axis of the working coordinate system. |
|||||||||||||||||||||||||||||||||||||||
| Header | Include mil.h. |
| Library | Use mil.lib; mil3d.lib. |
| DLL | Requires mil.dll; mil3d.dll. |