MimEdgeDetect
- See also

 Availability
Availability
 Function map
Function map
- Examples
 MimDraw
MimDraw
- MimErode

in the MIL Reference for the minimum update required.
| Table: | For specifying the filter to use |
| + combination: | For specifying the overscan setting |
| MIL_ID SrcImageBufId, | //in |
| MIL_ID DstIntensityImageBufId, | //in |
| MIL_ID DstAngleImageBufId, | //in |
| MIL_ID KernelId, | //in |
| MIL_INT64 ControlFlag, | //in |
| MIL_INT Threshold | //in |
This function performs an edge detection operation on the specified source image, using the specified filter. It produces a gradient intensity image and/or a gradient angle image in the specified image buffer(s). If one of the destination images is not required, specify M_NULL as its image buffer identifier.
For an unsigned destination buffer, the angle is returned from 0° to 360° (counter-clockwise) and mapped to the entire range of the destination buffer. For example, for an 8-bit unsigned buffer, the angles of 0°, 90°, 180°, and 270° map to 0, 64, 128, and 192, respectively. For a signed destination buffer, mapping is done in both the positive and negative range of the buffer and represents angle values from -180° to 180°. For example, for an 8-bit signed buffer, the angles of -180°, -90°, 0°, and 90° map to -128, -64, 0 and 64, respectively.
This function can also be performed on a floating-point buffer. However, the results are not mapped and are returned in the range of 0° to 360°. The degree of precision is equal to the precision of the floating-point buffer for regular computation or to +/- 0.4° for fast computation. The value for undefined results is the maximum positive value of the floating-point buffer.
You can perform the operation using a combination of fast and full gradient and angle computations.
|
Type of computation |
Description of computation |
|
Full gradient computation |
Gradient = sqrt(GradientX*GradientX + GradientY*GradientY) |
|
Fast gradient computation |
Gradient = (abs(GradientX) + abs(GradientY))/2 |
|
Full angle computation |
Angle = arctan(-GradientY/GradientX) |
|
Fast angle computation |
The fast angle approximation is based on the same equation as the full angle computation; however, the value is determined from a LUT mapping. |
Specifies the identifier of the source of the operation. This parameter must be given an image buffer identifier.
This image buffer must not have a region of interest (ROI) associated with it. Using an image buffer with an ROI will cause an error.
Specifies the identifier of the destination buffer for the resulting gradient intensity image. This parameter must be given an image buffer identifier or M_NULL. Saturation is performed on this buffer.
This image buffer must not have a region of interest (ROI) associated with it. Using an image buffer with an ROI will cause an error.
Specifies the identifier of the destination buffer for the resulting gradient angle image. This parameter must be given an image buffer identifier or M_NULL.
This image buffer must not have a region of interest (ROI) associated with it. Using an image buffer with an ROI will cause an error.
Note that this parameter cannot be set to M_NULL if DstIntensityImageBufId is also set to M_NULL, otherwise an error will occur.
Specifies the filter to use. This parameter must be set to the value below.
|
For specifying the filter to use |
|||||||||||||||||||||||||||||||||||||||
| Description | |||||||||||||||||||||||||||||||||||||||
|
Specifies to use the predefined 3x3 edge detection filters. The following kernel is convolved with the image to produce GradientX, which is an intermediate image used in the gradient or angle computation. For each pixel, GradientX contains directional derivative values calculated from horizontal (X-direction) intensity changes. 
The following kernel is convolved with the image to produce GradientY, which, like GradientX, is an intermediate image used in the gradient or angle computation. For each pixel, GradientY contains directional derivative values calculated from vertical (Y-direction) intensity changes. 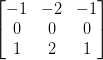
Specifies to use the predefined 3x3 edge detection filters. (more details...) |
|||||||||||||||||||||||||||||||||||||||
You can add one of the following values to the above-mentioned value to specify the overscan settings to use for the operation.
|
For specifying the overscan setting
|
|||||||||||||||||||||||||||||||||||||||
| Description | |||||||||||||||||||||||||||||||||||||||
|
Specifies to disable overscanning for this operation. You should disable overscanning to accelerate the operation for applications in which the overscan data is not important in the resulting buffer. (summarize)Specifies to disable overscanning for this operation. (more details...) |
|||||||||||||||||||||||||||||||||||||||
|
Specifies to enable overscanning for this operation. The overscan uses pixels from the ancestor of the source buffer. If the source buffer is not a child buffer, or if the point falls outside the ancestor buffer, a mirror type overscan is used. A mirror overscan specifies that the overscan pixels will be a mirror copy of the source buffer's border pixels. This is the default value. (summarize)Specifies to enable overscanning for this operation. (more details...) |
|||||||||||||||||||||||||||||||||||||||
|
Specifies that MIL will automatically select the overscan that optimizes speed, according to the specified operation and the target system. The overscan could be hardware-specific thereby having a different behavior than the other supported overscan modes. Note that when using M_OVERSCAN_FAST, the destination pixels in the overscan area are undefined. The pixels can therefore contain different values from one function call to the next, even if the function's parameter values are the same. (summarize)Specifies that MIL will automatically select the overscan that optimizes speed, according to the specified operation and the target system. (more details...) |
|||||||||||||||||||||||||||||||||||||||
Specifies how to perform the operation.
This parameter can be set to one of the following:
|
For specifying how to perform the
operation |
|||||||||||||||||||||||||||||||||||||||
| Description | |||||||||||||||||||||||||||||||||||||||
|
Same as M_FAST_EDGE_DETECT. |
|||||||||||||||||||||||||||||||||||||||
|
Specifies a full gradient computation and a fast angle approximation. |
|||||||||||||||||||||||||||||||||||||||
|
Specifies a fast gradient computation and a fast angle approximation. The gradient is computed as an approximation, using the average of the absolute value of the two directional components (X and Y). (summarize)Specifies a fast gradient computation and a fast angle approximation. (more details...) |
|||||||||||||||||||||||||||||||||||||||
|
Specifies a fast gradient computation and a full angle computation. |
|||||||||||||||||||||||||||||||||||||||
|
Specifies a full gradient computation and a full angle computation. The gradient is computed as the square root of the sum of the square of each directional component (X and Y). This calculation is slower but more precise. (summarize)Specifies a full gradient computation and a full angle computation. (more details...) |
|||||||||||||||||||||||||||||||||||||||
Specifies the threshold value for calculating the gradient angle. For a gradient intensity value lower than the threshold value, the angle is not computed (not considered a significant edge) and the resulting angle for that pixel is undetermined. To perform the full operation, set this parameter to zero or M_NULL.
Note that if MIL determines that calculating the gradient angle of all pixels is faster than excluding some pixels from the computation, the threshold value is simply ignored.
| Header | Include mil.h. |
| Library | Use mil.lib; milim.lib. |
| DLL | Requires mil.dll; milim.dll. |