Controlling configuration
- See also

 Availability
Availability
 Previous
Previous
- Next

-
Allocate a MIL application context, using MappAlloc().
-
If required, allocate a system on the local computer, using MsysAlloc(). If you don't specify a target computer when allocating a system, MIL allocates the system locally on the current computer (local computer).
-
Allocate a DMIL remote system on each of the remote computers, using MsysAlloc() with the target remote computer's identifier (for example, IP address).
Note that to allocate a DMIL remote system on the local computer (for example, to test your application) specify "localhost" or 127.0.0.1 as the computer identifier.
-
Call the MIL functions to perform the required operations, specifying objects allocated on these DMIL remote systems. Based on the objects passed, MIL will perform the functions on the most appropriate computer; if some of the objects are not on the selected computer, they will be copied to it. For this reason, MIL functions are most efficient when operating on objects whose systems are allocated on the same computer.
-
Free all allocated objects.
Note that all allocated objects must be freed before freeing the MIL system context (MsysFree()), which must be freed before freeing the MIL application context (MappFree()).
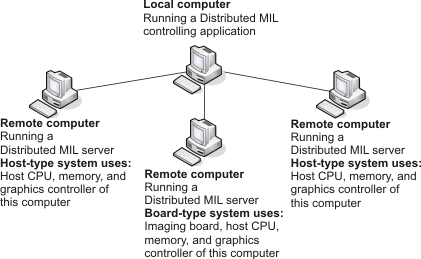
In the controlling configuration, a local computer allocates a MIL application context and then allocates one or more DMIL remote systems. It can allocate multiple board-type and Host-type DMIL remote systems.
The controlling application can only allocate remote systems on computers running the Distributed MIL server. The local computer runs the MIL controlling application, which manages the connection and communication with the remote systems.
All resources in a controlling configuration cluster can be shared transparently (automatic connection), except when network address translation (NAT), port forwarding, or other address translation tools are used. If these tools are used, a remote system can only share resources with the controlling application.
A simple controlling configuration cluster is illustrated below:
Steps to create a Distributed MIL controlling configuration
The following steps provide a basic methodology for creating a Distributed MIL controlling configuration:
Before you can run a Distributed MIL application, you must prepare the local computer and each of the remote computers with the appropriate software. See the Preparing computers for Distributed MIL section earlier in this chapter.
Allocating DMIL remote systems
DMIL remote systems are allocated in a similar manner as all MIL systems, using MsysAlloc() and specifying the type of MIL system to allocate. The additional information needed to allocate a DMIL remote system is the name or identifier of the computer on which to allocate the remote system.
To pass this information, the SystemDescriptor parameter of MsysAlloc() must specify the type of system to allocate, as well as identify the target remote computer on the network. To override the default Distributed MIL server connection port, SystemDescriptor should also specify the required port. The full syntax for the SystemDescriptor parameter is typically as follows:
where RemoteComputerIdentifier should be replaced with the remote computer's name or IP address; MIL supports both IPv4 and IPv6 addresses. PortNumber should be replaced with the port that the local computer should access on the remote computer to initiate new connections, unless the default server connection port is appropriate; in which case, omit the ":" and the port number. MILSystemType should be replaced with any valid MIL system type, such as M_SYSTEM_SOLIOS. The "://" and "/" are required separators.
In the following case, you don't need to explicitly specify a server connection port; the default matches the port to which the Distributed MIL server is listening on the remote computer.
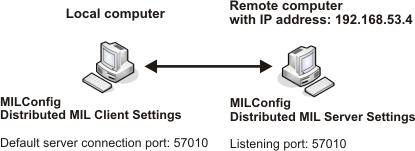
/* Connection made without specifying port. */
MsysAlloc(MIL_TEXT("dmiltcp://192.168.53.4/M_SYSTEM_HOST"), M_DEFAULT, M_DEFAULT,
&RemoteSystemId);
Whereas in the following case, you must explicitly specify a server connection port because by default, it does not correspond to the port to which the Distributed MIL server is listening. In this case, the server connection port must be set to 58000 to establish a connection.
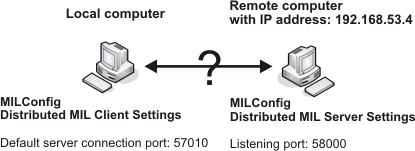
/* In this case, the connection cannot be made without specifying the port - an error */
/* is generated with the following call. */
MsysAlloc(MIL_TEXT("dmiltcp://192.168.53.4/M_SYSTEM_HOST"), M_DEFAULT, M_DEFAULT,
&RemoteSystemId);
/* Since the port is specified and it matches the listening port on the remote computer,*/
/* the connection is made with the following call. */
MsysAlloc(MIL_TEXT("dmiltcp://192.168.53.4:58000/M_SYSTEM_HOST"), M_DEFAULT, M_DEFAULT,
&RemoteSystemId);
If you specify a server connection port, ensure that the specified port corresponds to the listening port on the target remote computer. The listening port can be configured using the MILConfig utility on the target remote computer.
A typical IPv4 string has the format n.n.n.n, where n is a number between 0 and 255. A typical IPv6 string has the format x:x:x:x:x:x:x:x, where x is a hexadecimal number between 0000 and FFFF. If you are supplying an IPv6 address, you must use square brackets to separate the address from the port. For example:
Allocating a remote system by default
You can set your local computer's default system to a DMIL remote system. This means that when you allocate a default system on your local computer, using MsysAlloc() with SystemDescriptor set to M_SYSTEM_DEFAULT, you will automatically set up a Distributed MIL controlling configuration with a connection to this default remote system.
Your local computer's default system is set using the MILConfig utility. To reset your default system to a DMIL remote system, you must first register the remote system on your local computer. To register a remote system, open the MILConfig utility and enter the network computer's name or IP address, then select a system on that remote computer. This is done in the Registration pane, found in Distributed MIL - Controlling. Any single MIL system registered on the local computer, including the registered remote systems, can be chosen as the default system using the MILConfig utility on the Default Values pane, found under the General item.
Note that a remote computer has a default system of its own. You can allocate the remote computer's default system by setting the SystemDescriptor parameter to "dmiltcp://RemoteComputerIdentifier/M_SYSTEM_DEFAULT".
Execution of MIL functions on remote systems
In the controlling configuration, MIL decides where to execute a MIL function based on the MIL objects passed as parameters to the function. Therefore, to perform the required operations on a remote computer, allocate a DMIL remote system on this computer and then pass objects allocated on this remote system to the corresponding MIL functions.
When all of the MIL objects passed are allocated on the same DMIL remote system, MIL executes the function on the computer (processor) associated with this system.
When the MIL objects passed are allocated on different systems, MIL establishes if there is a computer (processor) associated with one of the systems most suitable to execute the operation. To be suitable, MIL must be able to temporarily copy all relevant MIL objects to this computer. Only objects allocated with the MIL Buffer module (Mbuf...()) can be copied to another computer (portable); other objects are not portable. If a MIL object is not portable, the computer associated with this object is typically selected as the most suitable. If two of the MIL objects are not portable and are on different computers, an error is generated.
If MIL establishes that a remote computer is the most suitable to execute a MIL function, the controlling application sends a command to this computer to execute the function. Then, using inter-system calls, the remote computer typically communicates directly with the other remote computers, to fetch a copy of any required MIL objects located on these computers and to send back any changes. Inter-system calls improve performance when multiple remote computers are involved. If an object is located on the local computer, inter-system calls are not used; the local computer will perform the required copy operations.
Since additional copy operations are avoided, MIL functions are most efficient when operating on objects whose systems are all allocated on the same computer.
Remote displays
When you allocate a display on a DMIL remote system, you can select image buffers allocated on that system, to the display. By default, these buffers are displayed on the local computer.

/* Allocate a display on a DMIL remote system, which displays image */
/* buffers on the local computer. */
MdispAlloc(RemoteSystemId, M_DEFAULT, MIL_TEXT("M_DEFAULT"), M_WINDOWED, &DisplayId);
MdispSelect(DisplayId, RemoteImageBufId);
If you want to display the buffers on the remote computer, specify M_REMOTE_DISPLAY when allocating the display. This is not supported for displays which display into a user-defined window.

/* Allocate a display on a DMIL remote system, which displays image buffers */
/* on a remote computer. */
MdispAlloc(RemoteSystemId, M_DEFAULT, MIL_TEXT("M_DEFAULT"),
M_WINDOWED+M_REMOTE_DISPLAY, &DisplayId);
MdispSelect(DisplayId, RemoteImageBufId);
When displaying on the local computer and the overlay mechanism is enabled, the display's overlay buffer is superimposed on the displayed buffer before the transfer.
By default, the display is updated after each modification to the displayed buffer (or the overlay buffer), and the application waits for the data to be transferred to the display before continuing. When a buffer, located on a remote system, is displayed on the local computer, the update time can significantly slow down your application. To reduce delays, you can display in asynchronous mode using MdispControl() with M_ASYNC_UPDATE. This mode uses multiple internal buffers to queue the updates and allows the application to continue once the update has been queued. This maximizes your bandwidth usage while minimizing processing delays.
To reduce transmission delays when the displayed buffer is modified, only the modified areas of the buffer are transmitted.
By default, MIL sends updates from the remote system to the local computer as fast as possible, limited by the available bandwidth and transmission delay. However, when updating the display asynchronously, it is possible to set an upper limit to the number of updates to perform per second, using MdispControl() with M_UPDATE_RATE_MAX. When a limit is specified, you can assume that there will be a minimum delay of 1/ M_UPDATE_RATE_MAX between two consecutive updates. Between transmissions, updates are accumulated into one update. Alternatively, whether updating the display synchronously or asynchronously, you can use MdispControl() with M_UPDATE_RATE_DIVIDER to skip updates. In this case, you specify after how many buffer modifications to update the display with the last modification, regardless of the time lapsed. This is especially useful when performing continuous grabs. When using M_UPDATE_RATE_DIVIDER, if fewer than the specified number of buffer modifications occur, the display will not be updated; whereas with M_UPDATE_RATE_MAX, the display will eventually be updated.
To reduce bandwidth usage, it is also possible to use compression so that the amount of data transmitted is minimal. You can activate compression using MdispControl() with M_COMPRESSION_TYPE. When enabled, data is compressed before being transmitted. The best compression rate is obtained with M_JPEG_LOSSY. The M_JPEG2000_LOSSY and M_JPEG2000_LOSSLESS compression types support much higher ratios of compression without compromising image quality. However, you should avoid the JPEG2000 compression types unless absolutely necessary since compression/decompression time is high; you should only use them when the benefits of compression outweigh the overhead associated with the compression/decompression. For example, you might need to use the JPEG2000 compression types when there are fine details in your image or overlay buffer. For both JPEG and JPEG2000 lossy compression types, you can manually adjust the compression factor by adjusting the quantization factor, using MdispControl() with M_Q_FACTOR. By default, the quantization factor for the compression is set to 80, but you can specify an integer value in the range of 1 to 99. The higher the factor, the more the compression, but the image quality suffers.
To change the default settings, you can use the MILConfig utility on the remote computer. If you select the High quality display option in the MILConfig utility, the display is updated synchronously and compression is disabled by default; if you select the Optimized for bandwidth usage display option, the display is updated asynchronously and M_JPEG_LOSSY compression is used by default.
Default values on remote systems
When a function is executed on a remote computer and you select M_DEFAULT (or any local defaults such as M_SYSTEM_DEFAULT), the default value set up on that remote computer is used. The default value could have been setup when installing MIL on that computer or using the MILConfig utility on that computer.
As mentioned above, the only exception is when allocating a display. When allocating a display on a remote system, the display appears, by default, on the local computer. The local computer's default video configuration format (VCF) is the format used. If you specify to have it appear on a remote computer (M_REMOTE_DISPLAY), the default VCF of the remote computer is used.
Files on remote systems
When a function takes a file name and is executed on the remote computer, MIL assumes that the file is on the local computer. To specify a file on the remote computer, prefix the specified file name with "remote:///" (for example, "remote:///C:\mydirectory\myfile").
Asynchronous calls
Most functions executed on a remote computer are executed asynchronously. The function execution request is sent to the remote computer and the local call returns immediately, without waiting for the request to complete. Except for functions that return values (for example, allocation and inquire functions), almost all other functions are asynchronous. Asynchronous calls are queued on the remote computer and processed in the order that they were issued on a thread-by-thread basis.
Multi-threading
The controlling configuration supports multi-threading. Each thread in the controlling application has a corresponding thread on the remote system. All requests made on a specific thread in the controlling application are executed on the same corresponding thread on the remote system; the sequence of calls in a thread is respected. Threads on the remote system are independent and parallelism in the controlling application is respected.
Executing a user-defined function on the remote system
When time is of essence and you have a series of functions that need to be executed on a remote computer and some are synchronous, you can create a MIL user-defined function that is executed on the remote computer and that calls the required series of functions.
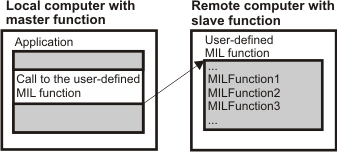
This avoids unnecessary communication with the local computer. To develop such a MIL user-defined function, see Chapter 53: The MIL function development module.