Defining 3D geometries
- See also

 Availability
Availability
 Previous
Previous
- Next

-
Allocate a 3D geometry object on the specified system, using M3dgeoAlloc() with M_GEOMETRY.
-
Define the geometry of the object by calling one of the 3D geometry definition functions (for example, M3dgeoBox() or M3dgeoCylinder()); see the 3D geometry objects subsection of this section. You can also copy a geometry result into the 3D geometry object to define it (for example, M3dimCopyResult() with M_BOUNDING_BOX).
-
If necessary, manipulate the defined geometry object using the 3D Image Processing module. You can translate, rotate, scale, or otherwise transform the geometry using M3dimTranslate(), M3dimRotate(), M3dimScale(), or M3dimMatrixTransform(), respectively.
-
Pass the 3D geometry object to a function that can take one (for example, M3dmetDistance() or M3dimCrop()).
-
Free the 3D geometry object, using M3dgeoFree().
3D geometry objects must be allocated and defined before using them as a source in other 3D modules.
Steps to defining and using a 3D geometry object
The following steps provide a basic methodology for defining 3D geometry objects.
3D geometry objects
The following table lists all 3D geometries that you can define; it also indicates the M3dgeo...() functions that you can use to define them.
|
Geometry name |
Example |
Geometry definition function |
|
Box |
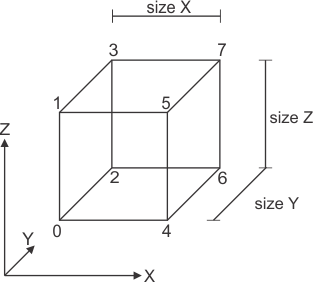
|
M3dgeoBox() |
|
Cylinder |
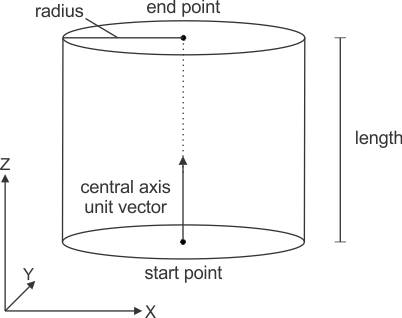
|
M3dgeoCylinder() |
|
Line |
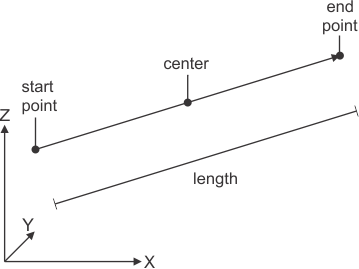
|
M3dgeoLine() |
|
Plane |
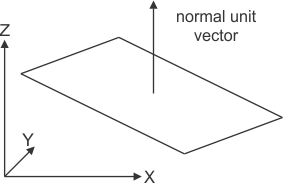
|
M3dgeoPlane() |
|
Sphere |
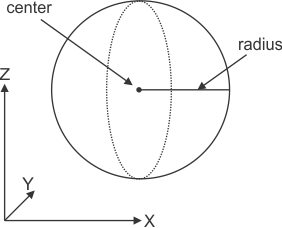
|
M3dgeoSphere() |