Adaptive binarizing
- See also

 Availability
Availability
 Previous
Previous
- Next

-
If (M_NIBLACK_BIAS x StandardDeviationToLocalMean) < M_MINIMUM_CONTRAST:
-
ThresholdValue = M_GLOBAL_MIN.
-
-
Otherwise:
-
ThresholdValue = LocalMean + (M_NIBLACK_BIAS x StandardDeviationToLocalMean) + M_GLOBAL_OFFSET.
-
-
If (MaxNeighborhoodValue - MinNeighborhoodValue) < M_MINIMUM_CONTRAST:
-
ThresholdValue = M_GLOBAL_MIN.
-
-
Otherwise:
-
ThresholdValue = (MaxNeighborhoodValue + MinNeighborhoodValue) / 2 + M_GLOBAL_OFFSET.
-
-
If (MorphOpenValue - MorphCloseValue) < M_MINIMUM_CONTRAST:
-
ThresholdValue = M_GLOBAL_MIN.
-
-
Otherwise:
-
ThresholdValue = (MorphOpenValue + MorphCloseValue) / 2 + M_GLOBAL_OFFSET.
-
To perform an adaptive binarization, call MimBinarizeAdaptive(). Similar to a conventional binarization (MimBinarize()), an adaptive binarization reduces an image to two grayscale values (such as white and black) by comparing each source pixel value against its corresponding threshold value. Pixels greater than their threshold are set to the highest unsigned destination buffer value. For example, in an 8-bit destination buffer, the highest value is 0xFF (255). Pixels less than or equal to their corresponding threshold are set to 0. This process can help identify pixels that are part of the object (pixels set to the highest value) and pixels that aren't (pixels set to 0).
MimBinarizeAdaptive() establishes threshold values according to the threshold mode control (MimControl() with M_THRESHOLD_MODE). Available threshold modes refer to adaptive algorithms, which perform multiple calculations using numerous sections of an image. When compared to a conventional binarization, which calculates threshold values using an image as a whole, an adaptive binarization is more robust at processing images containing pixels that are difficult to identify. Such difficulties typically come from poor or varying illumination or contrast. This type of robustness can cause an adaptive binarization to take longer to execute than a conventional one.
The following illustration shows that an adaptive binarization can better identify a crack in a cup, when compared to a conventional binarization, given poor lighting and contrast.
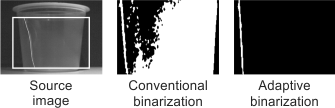
In this source image, pixel intensities transition from black (background) to gray (cup) to white (crack) to less white (reflectance on cup). Despite these complex shifts in intensity, an adaptive binarization is able to discern which pixels do not belong to the general quality of the image (the crack). Conventional binarizations are typically less robust at handling such intensity shifts.
The following example illustrates adaptive binarizations, and also compares them with conventional binarizations.
By default, MIL binzarizes objects that are lighter than the background. To binarize objects that are darker than the background, set the M_FOREGROUND_VALUE control to M_FOREGROUND_BLACK. You would change the default to, for example, binarize a black cup on a white background.
Adaptive binarize contexts
When you call MimBinarizeAdaptive(), you must specify an adaptive binarize type of image processing context, allocated using MimAlloc() with M_BINARIZE_ADAPTIVE_CONTEXT or M_BINARIZE_ADAPTIVE_FROM_SEED_CONTEXT.
Although both contexts perform an adaptive binarization, the threshold algorithms available for an M_BINARIZE_ADAPTIVE_FROM_SEED_CONTEXT context type utilize seeds in its calculations. Seeds refer to positions of significance, in the source, that affect resulting threshold values, so required information is preserved. You can either specify your own seed images or let MIL determine the seeds. M_BINARIZE_ADAPTIVE_FROM_SEED_CONTEXT typically applies when there is some foreknowledge about how images should look. Without such information, an M_BINARIZE_ADAPTIVE_CONTEXT type of context is usually best.
Customizing an adaptive binarization generally requires changing the context's threshold mode, and its related controls, using MimControl(). Available controls typically depend on the type of the context. Use MimInquire() to inquire the control's settings.
Some threshold modes use morphological processes, such as erode and dilate or open and close. For more information, see the Erosion and dilation section earlier in this chapter and the Opening and closing section earlier in this chapter.
After MIL establishes the threshold values, you can adjust them for binarization, using M_GLOBAL_OFFSET. For example, if you set M_GLOBAL_OFFSET to 1, MIL increases all threshold values by 1, and then binarizes the source image. The specified offset is reflected in the threshold destination image, which you can retrieve using MimBinarizeAdaptive() and the ThresholdImageBufId parameter. The default global offset is 0 (no adjustment).
For an adaptive binarize context that does not use seeds, you can use M_GLOBAL_MIN and M_GLOBAL_MAX to specify a minimum and maximum threshold value with which to binarize. The threshold destination image will not hold values that surpass these limits. Exceeding values are clipped. By default, MIL binarizes pixels with an intensity higher than the maximum as part of the foreground (object). To change this behavior, use the M_FOREGROUND_VALUE control. By default, there is no maximum threshold value restriction.
For any adaptive binarize context type, the source image can have a minimum or maximum value restriction (MbufControl() with M_MIN or M_MAX). These limits are reflected in the resulting threshold destination image. If the source image has a minimum or maximum value, and you are using M_GLOBAL_MIN or M_GLOBAL_MAX (for an adaptive binarize context that does not use seeds), MIL uses the greater minimum value, or the lesser maximum value, as the actual limits.
Controlling an adaptive binarize context
To control how MIL establishes the threshold values for an M_BINARIZE_ADAPTIVE_CONTEXT context type, you can set M_THRESHOLD_MODE to M_NIBLACK, M_LOCAL_MEAN, M_BERNSEN, or M_PSEUDOMEDIAN.
You can specify to use a hysteresis process by setting M_THRESHOLD_TYPE to M_HYSTERESIS. For more information, see the Hysteresis subsection of this section.
Threshold with Niblack
By default, MIL uses Niblack's adaptive threshold algorithm (M_NIBLACK). This setting offers the highest precision. The processing time is usually quite quick.
The following represents the general logic for calculating threshold values using Niblack.
To specify the size of the neighborhood around each source pixel with which to calculate the local mean (LocalMean) and the standard deviation (StandardDeviationToLocalMean), use M_LOCAL_DIMENSION. The size should be set to the largest square that represents a uniform background, and is bigger than the expected thickness of the object.
M_MINIMUM_CONTRAST represents the minimum distance between a pixel and the local mean, for MimBinarizeAdaptive() to consider the pixel a part of the object. M_NIBLACK_BIAS gives you some global control over the thresholding. A higher bias classifies fainter values as part of the object; as a result, noise can be more likely classified as part of the object. A lower bias is more likely to ignore noise, though it can also ignore values you consider part of the object.
Threshold with local mean
A local mean adaptive threshold algorithm (M_LOCAL_MEAN) is a simplified version of Niblack (M_NIBLACK). The differences are: M_NIBLACK_BIAS must be 0 and M_MINIMUM_CONTRAST is ignored. A local mean threshold usually results in a faster, though less precise, binarization than Niblack.
Threshold with Bernsen
Bernsen's adaptive threshold algorithm (M_BERNSEN) represents a type of morphological erosion and dilation. This threshold results in the fastest process.
The following represents the general logic for calculating threshold values using Bernsen.
To specify the size of the neighborhood around each source pixel with which to calculate the minimum (MinNeighborhoodValue) and maximum (MaxNeighborhoodValue) neighborhood value, use M_LOCAL_DIMENSION. The size should be set to a value that is somewhat wider than the thickness of objects. This ensures that both background and object pixels are present in the neighborhood of any object pixel.
When using M_BERNSEN, MIL compares the minimum contrast (M_MINIMUM_CONTRAST) to the difference between maximum and minimum values of the neighborhood. This guards against over binarizing relatively homogeneous regions. Typically, you should set the minimum contrast to a value above 5 (the default).
Threshold with pseudomedian
A pseudomedian adaptive threshold algorithm (M_PSEUDOMEDIAN) is similar to a Bernsen threshold, except it represents a type of morphological open and close process instead of erosion and dilation.
The following represents the general logic for calculating threshold values using M_PSEUDOMEDIAN.
With pseudomedian, MIL determines the threshold value for each pixel using the mean of grayscale values obtained by performing a morphological open (MorphOpenValue) and close (MorphCloseValue) operation on the source image. To specify the size of the neighborhood around each source pixel with which to perform the morphological open and close operations, use M_LOCAL_DIMENSION. Set the size to a value that is approximately half the expected thickness of objects.
When using M_PSEUDOMEDIAN, MIL compares the minimum contrast (M_MINIMUM_CONTRAST) to the difference between the opened and closed values of pixels. This guards against over binarizing relatively homogeneous regions.
Hysteresis
The adaptive binarization threshold that you specify with M_THRESHOLD_MODE uses a hysteresis process if you specify a threshold type (with M_THRESHOLD_TYPE) other than M_SINGLE. In this case, a seed type thresholding (geodesic reconstruction) is performed after a second pass of the specified threshold. Specifically, MIL internally calls MimBinarizeAdaptive() twice. The first pass processes as usual, according to the M_THRESHOLD_MODE setting. For the second pass, MimBinarizeAdaptive() uses the M_..._SECOND_PASS settings while reapplying the same threshold. MIL then performs a geodesic reconstruction (a type of morphological erosion or dilation), using the results of the first pass as the source data and the results of the second pass as the seed data. This is similar to an M_RECONSTRUCT threshold mode (available with an M_BINARIZE_ADAPTIVE_FROM_SEED_CONTEXT context type). For more information, see the Threshold with geodesic reconstruction subsection of this section.
Regardless of threshold mode, MIL uses M_GLOBAL_OFFSET_SECOND_PASS instead of M_GLOBAL_OFFSET during the second pass of MimBinarizeAdaptive(). For an M_NIBLACK threshold mode, the second pass also uses M_NIBLACK_BIAS_SECOND_PASS instead of M_NIBLACK_BIAS. MIL generates an error if every M_..._SECOND_PASS value it uses is the same as its first pass counterpart.
You can set M_THRESHOLD_TYPE to specify which values to use as foreground. Setting M_THRESHOLD_TYPE to M_IN_RANGE specifies to use as foreground the values inside the range defined by the two hysteresis passes. The M_OUT_RANGE setting specifies to use the values outside this range as the foreground.
Controlling an adaptive binarize context that uses seeds
To control how MIL establishes the threshold values for an M_BINARIZE_ADAPTIVE_FROM_SEED_CONTEXT context type, you can set M_THRESHOLD_MODE to M_RECONSTRUCT, M_LEVEL, or M_TOGGLE.
By default, MIL applies the specified threshold mode iteratively until the process reaches idempotence. Idempotence refers to the number of iterations at which subsequent iterations do not alter results. To specify a specific number of iterations, use M_NB_ITERATIONS.
Threshold with geodesic reconstruction
By default, MIL uses an adaptive geodesic reconstruction threshold (M_RECONSTRUCT). This represents a type of morphological erosion or dilation, with seeds. When you call MimBinarizeAdaptive(), you can provide a seed image. If you do not, MIL internally establishes the seed data.
MIL performs the geodesic reconstruction according to the foreground (M_FOREGROUND_VALUE). If you specify an image and the foreground is white (default), MIL dilates the pixels of the seed until they reach darker pixels in the source. For a black foreground, MIL erodes the pixels of the seed until they reach lighter pixels in the source. MIL then applies the offset (M_GLOBAL_OFFSET) to the resulting image and uses it as the threshold with which to perform the binarization. The following illustrates a one-dimensional grayscale profile of a source image and a seed image that you can use with a geodesic reconstruction threshold.

If you do not specify a seed image, MIL either erodes (for a white foreground) or dilates (for a black foreground) the source image, according to the number of seed iterations (M_NB_SEED_ITERATIONS).
The processing time resulting from an M_RECONSTRUCT threshold is typically faster than M_LEVEL and slower than M_TOGGLE.
Threshold with leveling
A level threshold (M_LEVEL) represents a type of morphological erosion and dilation, with seeds. When you call MimBinarizeAdaptive(), you can provide a seed image. If you do not, MIL internally establishes the seed data.
Leveling essentially performs two geodesic reconstructions (M_RECONSTRUCT). One that processes the foreground as white, and the other that processes the foreground as black. For the white foreground, MIL dilates the pixels of the seed until they reach darker pixels in the source. For the black foreground, MIL erodes the pixels of the seed until they reach lighter pixels in the source. MIL then applies the offset (M_GLOBAL_OFFSET) to the resulting image and uses it as the threshold with which to perform the binarization. The following illustrates a one-dimensional grayscale profile of a source image and a seed image that you can use with a level threshold.

If you do not specify a seed image, MIL establishes them by performing a convolution on the source image using a smoothing filter (kernel), according to the number of seed iterations (M_NB_SEED_ITERATIONS).
The processing time resulting from an M_LEVEL threshold is typically longer than M_RECONSTRUCT or M_TOGGLE. M_LEVEL generally takes twice as long as M_RECONSTRUCT.
Threshold with toggling
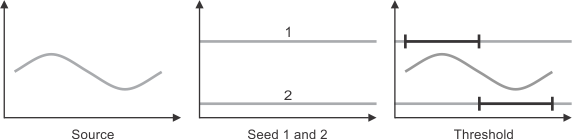
A toggle threshold (M_TOGGLE) depends on two types of seed data (typically min and max values), each of which MIL can use to establish the threshold values with which to binarize. When you call MimBinarizeAdaptive(), you can provide two seed images. If you do not, MIL internally establishes the seed data.
For every source pixel, MIL applies the offset (M_GLOBAL_OFFSET) and compares the result to both seed values. The threshold with which to binarize is the seed to which the result is closest. This can be seen as snapping each threshold value to one of the two seed values. Unlike other threshold modes, this is a single iteration process (M_NB_ITERATIONS is always one). If the source pixel is perfectly equidistant from both seeds, MIL uses the source pixel value itself as the threshold value.
The following illustrates a one-dimensional grayscale profile of a source image and two seed images that you can use with a toggle threshold. The threshold is the closest seed.
If you do not specify a seed image, MIL performs an erosion on its automatically established first seeds, and a dilation on its automatically established second seeds, according to the number of seed iterations (M_NB_SEED_ITERATIONS).
The processing time resulting from an M_TOGGLE threshold is typically faster than M_RECONSTRUCT or M_LEVEL. Since toggling categorizes threshold values as one of two possibilities, it typically implies that you have already preprocessed your images.