McalDraw
- See also

 Availability
Availability
 Function map
Function map
- Examples
 McalControl
McalControl
- McalDraw3d

in the MIL Reference for the minimum update required.
3dprofilemetrology.cpp
calibrationfromlist.cpp
cameralasercalibration.cpp
cameraonrobotarmcalibration.cpp
defectdetectionexample.cpp
dxfmodelfinding.cpp
examplemanagerfor3d.cpp
fixturedcoderead.cpp
fixturingusingblob.cpp
gumpackinspection.cpp
inspectiontask.cpp
m3dmap.cpp
m3dmap.cs
m3dmap.vb
mbead.cpp
mbead.cs
mbead.vb
mcal.cpp
mcal.cs
mcal.vb
multiviewannotations.cpp
objectlocalization3d.cpp
registeredgoldentemplate.cpp
stereocalibration.cpp
unwarpmultiviewcylinder.cpp
variouscodereadings.cpp
| MIL_ID ContextGraId, | //in |
| MIL_ID ContextCalOrImageBufId, | //in |
| MIL_ID DstImageBufOrListGraId, | //in |
| MIL_INT64 Operation, | //in |
| MIL_INT Index, | //in |
| MIL_INT64 ControlFlag | //in |
This function draws specific features of results, obtained from a camera calibration operation, in the destination image buffer or 2D graphics list.
Specifies the identifier of the 2D graphics context to use when drawing. This parameter must be set to one of the following values:
|
For specifying the 2D graphics context |
|||||||||||||||||||||||||||||||||||||||
| Description | |||||||||||||||||||||||||||||||||||||||
|
Specifies that the default 2D graphics context of the current MIL application is used. Note that there is a different default 2D graphics context for each thread. (summarize)Specifies that the default 2D graphics context of the current MIL application is used. (more details...) |
|||||||||||||||||||||||||||||||||||||||
|
Specifies a valid 2D graphics context identifier, which you have allocated using MgraAlloc(). |
|||||||||||||||||||||||||||||||||||||||
Specifies the camera calibration context, calibrated image, corrected image, or fixturing offset object from which to extract the information to draw.
When specifying a calibrated image or corrected image, the image cannot be associated with a region of interest (ROI), otherwise an error will occur.
If passing a camera calibration context, it must have been previously allocated on the required system using McalAlloc(). The camera calibration context should have been successfully calibrated using McalList() or McalGrid().
When working in M_3D_ROBOTICS camera calibration mode, it is possible to use McalDraw() with M_DRAW_IMAGE_POINTS, and for fiducial grids M_DRAW_FIDUCIAL_BOX, between two successful calls to McalGrid() / McalList(), to draw the calibration points or the fiducial box of one camera calibration pose before being fully calibrated.
If passing a fixturing offset object, it must have been previously allocated on the required system using McalAlloc() with M_FIXTURING_OFFSET. In addition the fixturing offset object should have been set up using McalFixture() with M_LEARN_OFFSET.
If ContextCalOrImageBufId is set to M_NULL, the coordinate system of the destination image is used.
Specifies the identifier of the destination image buffer or 2D graphics list in which to draw. If a buffer is specified, it must be an unsigned 8-bit image buffer. By drawing into the display's overlay buffer or associating the 2D graphics list with the display, you can also annotate an image non-destructively.
If specifying an image buffer, it must not have a region of interest (ROI) associated with it. Using an image buffer with an ROI will cause an error.
If you specify a 2D graphics list, the 2D graphics list must have been previously allocated using MgraAllocList().
Specifies the type of operation to perform.
For a camera calibration context, calibrated image, or corrected image, you can set the Operation parameter to one of the following values. Note that if no combination constant is specified, the coordinate system will be drawn as if M_DRAW_ALL were specified.
|
For a camera calibration context, calibrated image,
or corrected image |
|||||||||||||||||||||||||||||||||||||||
| Description | |||||||||||||||||||||||||||||||||||||||
|
Draws the absolute coordinate system of the specified source camera calibration context or calibrated image (ContextCalOrImageBufId). If ContextCalOrImageBufId is set to M_NULL, the function draws the absolute coordinate system of the destination image, DstImageBufOrListGraId. In the case of a 2D graphics list being passed as the destination, the function will use the camera calibration information associated with the image in which the graphics in the 2D graphics list are rendered; when the 2D graphics list is associated with a display, it uses the camera calibration information of the image currently selected to the display. An error is reported if ContextCalOrImageBufId is M_NULL and the image passed to DstImageBufOrListGraId is not a calibrated image. In the case of a 2D graphics list being passed as the destination, the error will occur when the graphics in the 2D graphics list are rendered in an uncalibrated image or display. If both ContextCalOrImageBufId and DstImageBufOrListGraId have camera calibration information associated with them, the camera calibration information associated with ContextCalOrImageBufId will be used to define the position of the coordinate system, while DstImageBufOrListGraId will be used to define the mapping of the coordinates between world and pixel units. (summarize)Draws the absolute coordinate system of the specified source camera calibration context or calibrated image (ContextCalOrImageBufId). (more details...) |
|||||||||||||||||||||||||||||||||||||||
|
Draws the pixel coordinate system of the destination image, DstImageBufOrListGraId with the origin placed at the center of the top-left pixel. ContextCalOrImageBufId must be set to M_NULL. In the case of a 2D graphics list being passed as the destination, the function will draw the pixel coordinate system of the image in which the graphics in the 2D graphics list are rendered; when the 2D graphics list is associated with a display, it draws the pixel coordinate system of the image currently selected to the display. (summarize)Draws the pixel coordinate system of the destination image, DstImageBufOrListGraId with the origin placed at the center of the top-left pixel. (more details...) |
|||||||||||||||||||||||||||||||||||||||
|
Draws the relative coordinate system of the specified source camera calibration context or calibrated image (ContextCalOrImageBufId). If ContextCalOrImageBufId is set to M_NULL, the function draws the relative coordinate system of the destination image, DstImageBufOrListGraId. In the case of a 2D graphics list being passed as the destination, the function will use the camera calibration information associated with the image in which the graphics in the 2D graphics list are rendered; when the 2D graphics list is associated with a display, it uses the camera calibration information of the image currently selected to the display. An error is reported if ContextCalOrImageBufId is M_NULL and the image passed to DstImageBufOrListGraId is not a calibrated image. In the case of a 2D graphics list being passed as the destination, the error will occur when the graphics in the 2D graphics list are rendered in an uncalibrated image or display. If both ContextCalOrImageBufId and DstImageBufOrListGraId have camera calibration information associated with them, the camera calibration information associated with ContextCalOrImageBufId will be used to define the position of the coordinate system, while DstImageBufOrListGraId will be used to define the mapping of the coordinates between world and pixel units. (summarize)Draws the relative coordinate system of the specified source camera calibration context or calibrated image (ContextCalOrImageBufId). (more details...) |
|||||||||||||||||||||||||||||||||||||||
You can add one of the following values to the above-mentioned values to specify how to draw the coordinate system.
|
For specifying how to draw the coordinate
system
|
|||||||||||||||||||||||||||||||||||||||
| Description | |||||||||||||||||||||||||||||||||||||||
|
Draws the coordinate system using all the features listed in this table. The behavior of M_DRAW_AXES is chosen over M_DRAW_FRAME. The following is an example of the annotations. 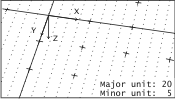
This is the default value. (summarize)Draws the coordinate system using all the features listed in this table. (more details...) |
|||||||||||||||||||||||||||||||||||||||
|
Draws the X-axis and Y-axis lines with arrow heads and axis labels. If the Z-axis can be seen, it is drawn with an arrow and label. The following is an example of the annotations. 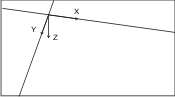
Draws the X-axis and Y-axis lines with arrow heads and axis labels. (more details...) |
|||||||||||||||||||||||||||||||||||||||
|
Draws three arrows (instead of full axes) and axis labels. The following is an example of the annotations. 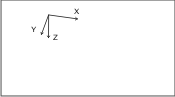
Draws three arrows (instead of full axes) and axis labels. (more details...) |
|||||||||||||||||||||||||||||||||||||||
|
Draws the legend in the image at the bottom-right. The major unit describes the distance in real-world units between two major marks, and the minor unit describes the distance in real-world units between two minor marks. The following is an example of the annotations. 
Draws the legend in the image at the bottom-right. (more details...) |
|||||||||||||||||||||||||||||||||||||||
|
Draws crosses at each major tick mark. The following is an example of the annotations. 
Draws crosses at each major tick mark. (more details...) |
|||||||||||||||||||||||||||||||||||||||
|
Draws dots at each minor tick mark. The following is an example of the annotations. 
Draws dots at each minor tick mark. (more details...) |
|||||||||||||||||||||||||||||||||||||||
You can add the following value to the above-mentioned values to specify a new location for the axes to cross if drawing the world coordinate (0,0) causes an arrow not to be visible.
|
For specifying where the axes will be
displayed
|
|||||||||||||||||||||||||||||||||||||||
| Description | |||||||||||||||||||||||||||||||||||||||
|
Specifies to choose a new location for the axes to cross if, when trying to draw the lines and arrows at world coordinate (0,0), part of the axes would not otherwise be visible . |
|||||||||||||||||||||||||||||||||||||||
For a camera calibration context, you can set the Operation parameter to one of the following:
|
For a camera calibration context |
|||||||||||||||||||||||||||||||||||||||
| Description | |||||||||||||||||||||||||||||||||||||||
|
Draws a box around the fiducial located during calibration, for fiducial grids with a Data Matrix code (McalGrid() with M_GRID_FIDUCIAL set to M_DATAMATRIX). |
|||||||||||||||||||||||||||||||||||||||
|
Draws the calibration points, used with McalGrid() or McalList(), to calibrate the source camera calibration context (ContextCalOrImageBufId). It draws the points at the original pixel positions specified (or established) for the calibration points during camera calibration; it does not use the mapping established during camera calibration. (summarize)Draws the calibration points, used with McalGrid() or McalList(), to calibrate the source camera calibration context (ContextCalOrImageBufId). (more details...) |
|||||||||||||||||||||||||||||||||||||||
|
Draws a contour of the rectangle surrounding the calibrated area when using piecewise linear camera calibration mode (M_LINEAR_INTERPOLATION). The points transformed in this calibrated area are never extrapolated, only interpolated. (summarize)Draws a contour of the rectangle surrounding the calibrated area when using piecewise linear camera calibration mode (M_LINEAR_INTERPOLATION). (more details...) |
|||||||||||||||||||||||||||||||||||||||
|
Draws a filled rectangle on the calibrated area when using piecewise linear camera calibration mode (M_LINEAR_INTERPOLATION). The points transformed in this calibrated area are never extrapolated, only interpolated. (summarize)Draws a filled rectangle on the calibrated area when using piecewise linear camera calibration mode (M_LINEAR_INTERPOLATION). (more details...) |
|||||||||||||||||||||||||||||||||||||||
|
Draws the real-world positions of the calibration points, used with McalGrid() or McalList(), to calibrate the source camera calibration context (ContextCalOrImageBufId). To draw the real-world positions, it transforms these positions to pixel units using the camera calibration context associated with destination image, or using ContextCalOrImageBufId if the destination image is not calibrated. It does not use the original pixel positions specified (or established) for the calibration points during camera calibration; it uses the mapping established during camera calibration. (summarize)Draws the real-world positions of the calibration points, used with McalGrid() or McalList(), to calibrate the source camera calibration context (ContextCalOrImageBufId). (more details...) |
|||||||||||||||||||||||||||||||||||||||
For a fixturing offset object, you can set the Operation parameter to the following:
|
For a fixturing offset object |
|||||||||||||||||||||||||||||||||||||||
| Description | |||||||||||||||||||||||||||||||||||||||
|
Specifies to draw the reference location that would have been used to place the current relative coordinate system of the destination image, given the specified fixturing offset object. McalDraw() draws a line from the current origin of the relative coordinate system to the inferred reference position. It also draws a small arrow at this position, which illustrates the inferred reference angle. If the destination image is not calibrated, McalDraw() behaves as if it were calibrated with a uniform scale of 1 and an absolute and relative coordinate system equal to the pixel coordinate system. Note, however, that the destination image remains uncalibrated. In the case of a 2D graphics list being passed as the destination, the function will use the camera calibration information associated to the image at the time of annotation. (summarize)Specifies to draw the reference location that would have been used to place the current relative coordinate system of the destination image, given the specified fixturing offset object. (more details...) |
|||||||||||||||||||||||||||||||||||||||
Specifies the index of the pose of a M_3D_ROBOTICS camera calibration context from which the calibration points or fiducial box should be drawn. If this information is not required or supported, set this parameter to M_DEFAULT.
|
For specifying the index of the pose |
|||||||||||||||||||||||||||||||||||||||
| Description | |||||||||||||||||||||||||||||||||||||||
|
Specifies to draw the calibration points of the last pose, for M_3D_ROBOTICS camera calibration contexts. For all other cases, implements the default behavior. (summarize)Specifies to draw the calibration points of the last pose, for M_3D_ROBOTICS camera calibration contexts. (more details...) |
|||||||||||||||||||||||||||||||||||||||
|
Specifies the index of a camera calibration pose. Use McalInquire() with M_NUMBER_OF_CALIBRATION_POSES to determine the number of poses. This setting must be used only when drawing calibration points of a camera calibration context in M_3D_ROBOTICS mode. (summarize)Specifies the index of a camera calibration pose. (more details...) |
|||||||||||||||||||||||||||||||||||||||
| Header | Include mil.h. |
| Library | Use mil.lib; milcal.lib. |
| DLL | Requires mil.dll; milcal.dll. |